Yaskawa FSP Amplifier FlexWorks User Manual
Page 139
Command Reference
139
S
YNTAX
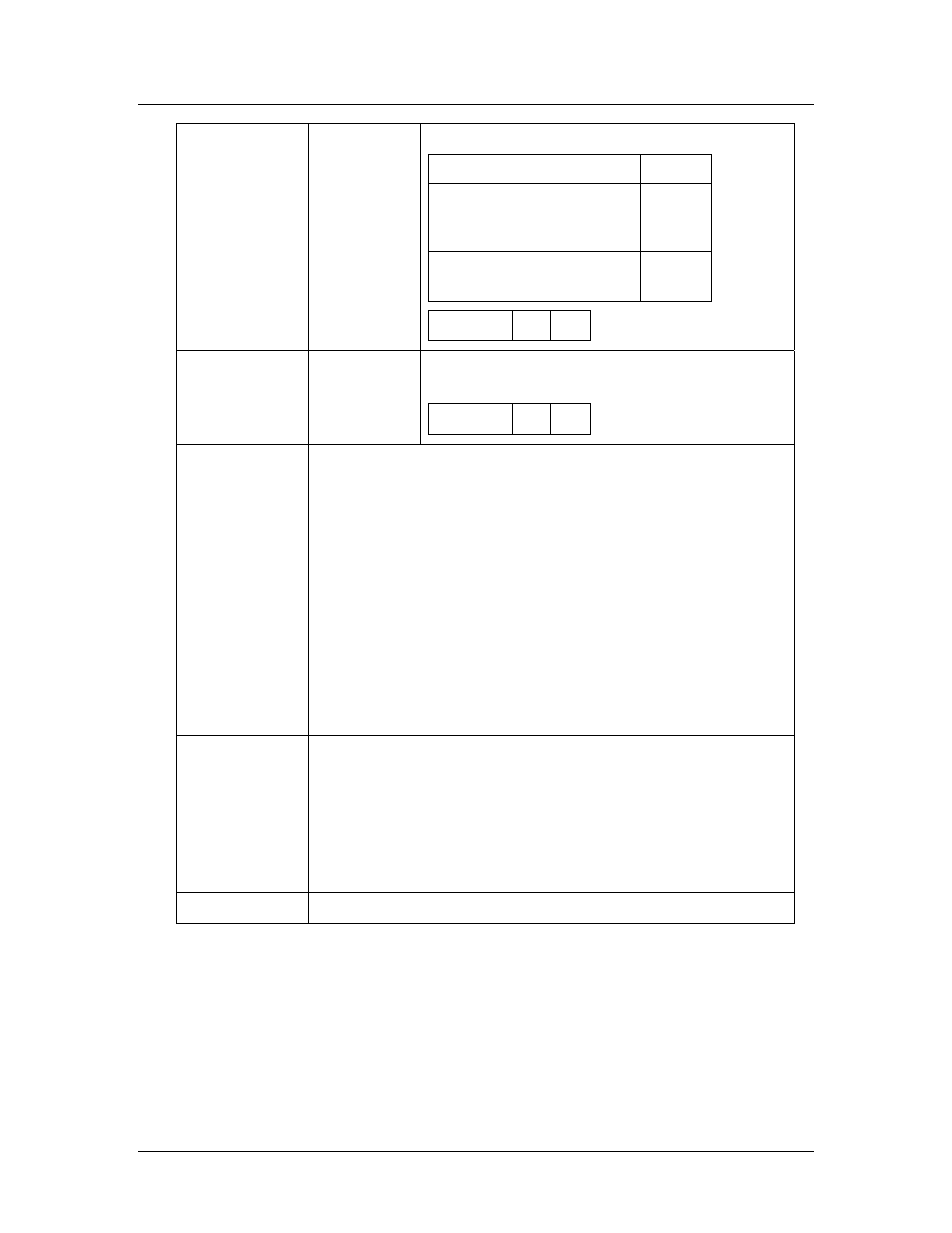
A
RGUMENTS
(C
ONT
.)
then
Specifies the action to take:
Setting Code
CALL - call subroutine
with specified
when finished, return.
0
GO_TO - continue from
the specified
1
Serial
1 U
S
YNTAX
A
RGUMENTS
label
Label to jump to as required by the
operation specified in
Serial
1 U
E
XAMPLE
SET_ZERO_POSITION demand_position
SET_OUTPUT 1 Off
DELAY 1000
LABEL 1
SLIDE 100
DELAY 100
IF Position_actual_value > 550000 THEN GO_TO
2
GO_TO 1
END
LABEL 2
SET_OUTPUT 1 ON
SLIDE 0
END
E
XAMPLE
E
XPLANATION
Position is set to zero, output 1 is set to off. The
motor starts moving at a constant speed. After a
short delay the term is checked (motor is still
running). If true (i.e., the position value is greater
than 550000) go to LABEL 2, output 1 is set to ON,
motion stops, end of program. If false the subroutine
labeled 1 starts again, until the term becomes true.
S
EE
A
LSO
IF_INPUT, CASE, CALL, GO_TO, WAIT_VAR