Start stop_ex, Start, Stop_ex – Yaskawa FSP Amplifier FlexWorks User Manual
Page 180
Command Reference
180
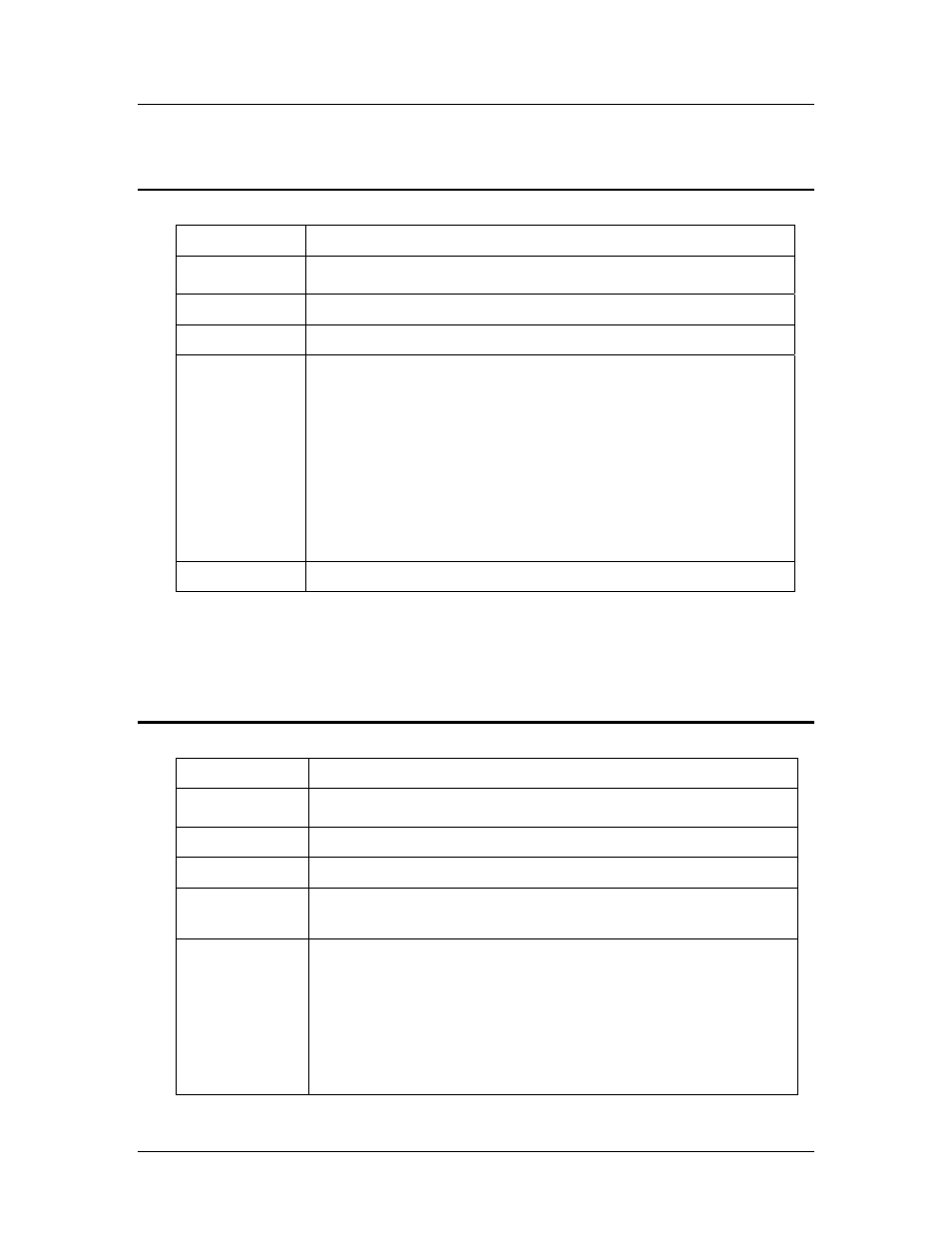
START
G
ROUP
Motion
S
YNTAX
START
O
P
. C
ODE
82
M
ODES
Immediate
D
ESCRIPTION
Triggers the execution of a previously defined motion
that is held by a WAIT_FOR_START command.
The START command reaches all the drives (provided
that several drives are connected via serial
communication) at the same time as a broadcast
message.
The START command clears the WAIT_FOR_START
flag. Therefore the WAIT_FOR_START command must
be set per motion.
S
EE
A
LSO
WAIT_FOR_START
STOP_EX
G
ROUP
Motion
S
YNTAX
STOP_EX
O
P
. C
ODE
153
M
ODES
Program, Immediate, Sequential
M
OTION
M
ODE
Position (1)
D
ESCRIPTION
This command is used to stop motor motion. The rate
of deceleration is dependent on the
chosen.
The
argument specifies whether or not the
servo must remain enabled after stopping (but cannot
be used to enable a previously disabled servo). The
program can also be terminated after the motor has
stopped.