Jerk_time – Yaskawa FSP Amplifier FlexWorks User Manual
Page 147
Command Reference
147
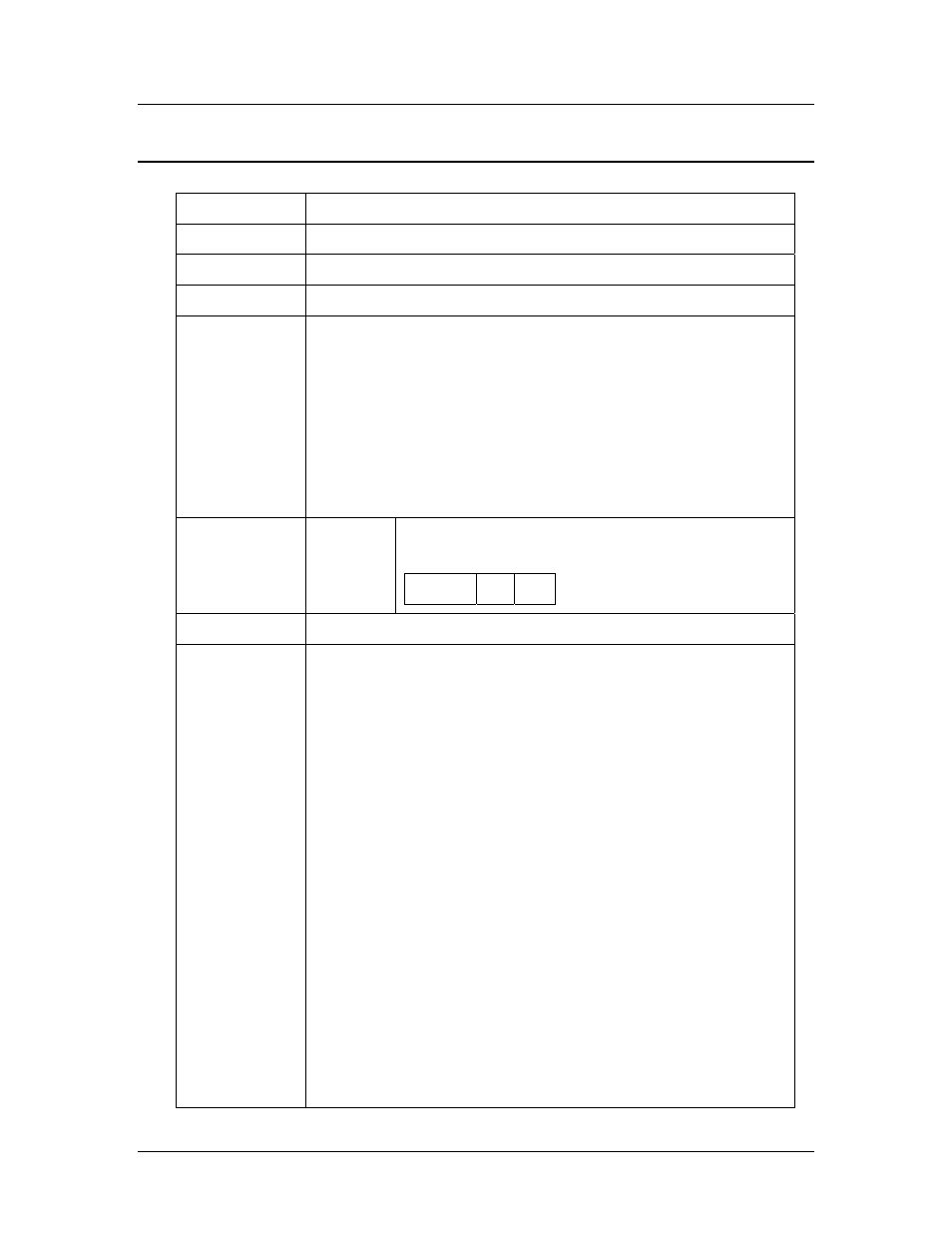
JERK_TIME
G
ROUP
Motion Profile
S
YNTAX
JERK_TIME
O
P
. C
ODE
74
M
ODES
Program, Immediate, Sequential
D
ESCRIPTION
Defines the time duration for the changing of
acceleration and deceleration. Sets the jerk time
value for the motion profile (See section 12.2.). The
command changes the profile jerk time (See section
12.2.3.) value set by parameter Pn2A6 and remains in
effect until the next controller reset.
The jerk time affects the profile of motions
commanded by: MOVE, MOVE_D, MOVE_R, MOVE_H,
GO, GO_D, SLIDE, SLIDE_ANALOG
S
YNTAX
A
RGUMENTS
time
Jerk time.
[μs] Range: 0 – 63999 μs
Serial 4 U
E
XAMPLE
JERK_TIME 2000
N
OTE
1. The JERK_TIME value has priority over the Low
Pass Command Filter (Pn216) variable. However, if
the JERK_TIME is smaller than 250, the JERK_TIME is
ignored and only the Low Pass Command Filter value
is used, even if the JERK_TIME is subsequently
changed.
2. For the motion commands GO, GO_D, MOVE,
MOVE_D which are stored in the motion buffer,
changing the jerk value will affect them only if the
change is made before the command is issued, i.e.,
before the command is sent to the buffer.
3. For commands GO_H, MOVE_H, changing the jerk
value will affect them only if the change is made
before the first command is issued. For the change to
affect the motion, the motion mode must first be
changed (e.g., by using the STOP_EX command).
4. For the command MOVE_R, changing the jerk value
will affect it only if the change is made before the
command is issued. For the change to affect the
motion, the motion mode must first be changed (e.g.,
by using the STOP_EX command).