Yaskawa FSP Amplifier FlexWorks User Manual
Page 105
Command Reference
105
♦ Torque: The TORQUE command is immediately applied to the
motor, the torque-changing rate being limited by the
Torque_slope variable.
♦ Speed Control: A speed control loop is closed on the reference
command instead of the position control loop that is normally
used (SPEED_CONTROL).
♦ Homing: Homing commands (HARD_HOME, HOME_SW,
HOME_SW_C, HOME_C) start an automatic search for the home
position according to the homing parameter values.
♦ Hunting: While in this mode, both the target position and the
motion profile (See section 12.2.) can be adjusted during
motion. The revised settings will be applied even to the motion
in progress. Note that changing the jerk time (See section
12.2.3) while in hunting mode does not take effect until the
motion mode is changed.
♦ Pulse Train: A reference position command is given by pulse-
train from an external source (MOVE_R).
♦ Analog Speed: A reference speed command is given by analog
input from an external source and the position control loop is
closed on the reference value (SLIDE_ANALOG).
♦ Analog Torque: A reference torque command is given by
analog input from an external source and the position control
loop is closed on the reference value (TORQUE_ANALOG).
♦ ECAM: In ECAM mode, you specify the position that a slave axis
must reach, depending on the position of a master axis or on
the time elapsed.
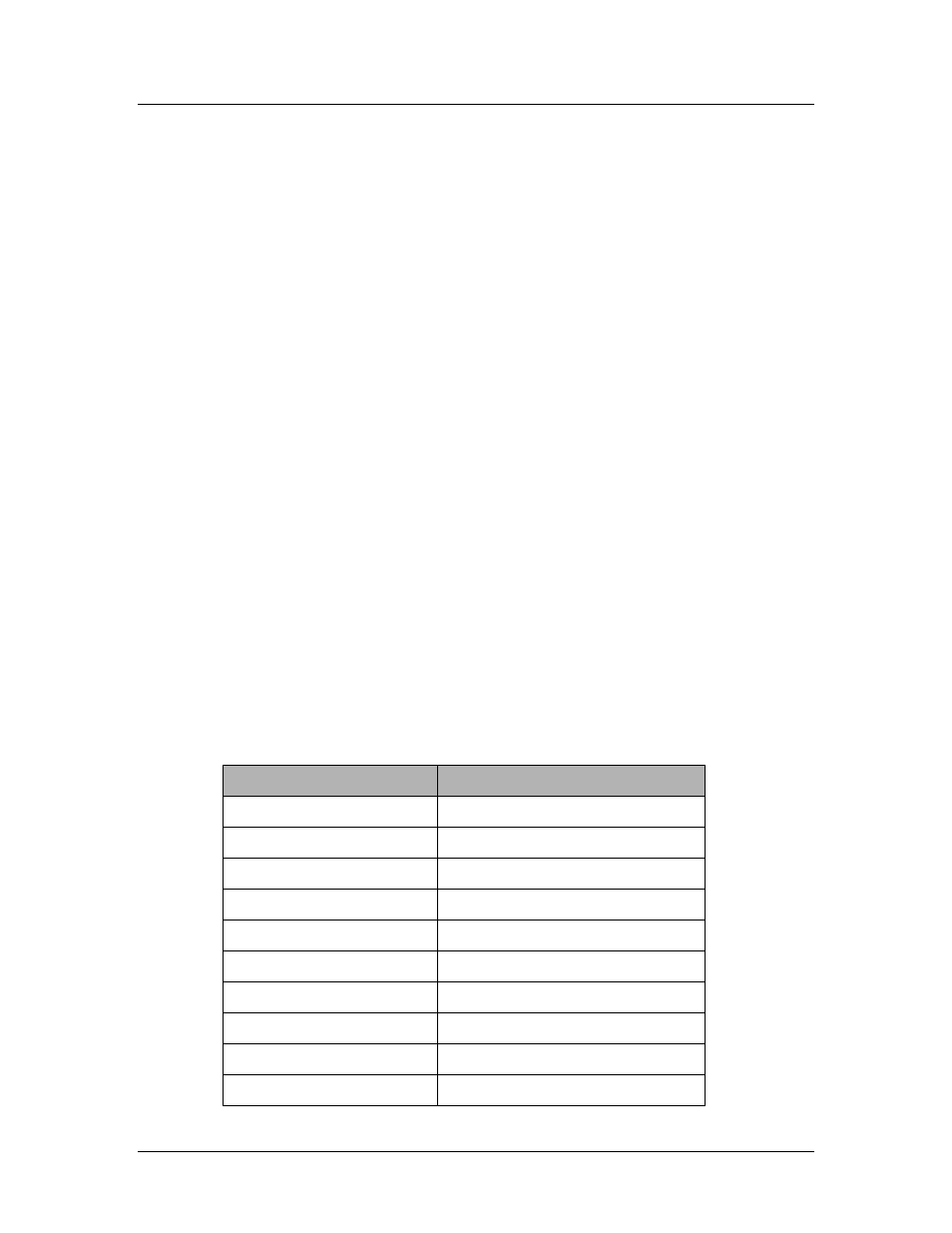
Table 15: Mode of Operation Values
M
OTION MODE NAME
M
OTION
_
MODE VALUE
POSITION 1
VELOCITY 3
TORQUE 4
HOMING 6
SPEED_CONTROL 0
HUNTING -1
PULSE_TRAIN -3
ANALOG_SPEED -4
ANALOG_TORQUE -5
ECAM -7