Can troubleshooting – Seed Hawk Raven 2012 User Manual
Page 232
Chapter 13
220
Seed Hawk® Viper Pro™ Installation & Operation Manual
CAN Troubleshooting
Although the control algorithm is located within the CAN node, all of the same troubleshooting techniques used
in a traditional hard-wired system still apply to a CAN system. CAN allows for modularization of the control
system, but the behavior of the system remains the same. Flow and speed sensors, as well as the control
valve and section valves, are used in the same fashion.
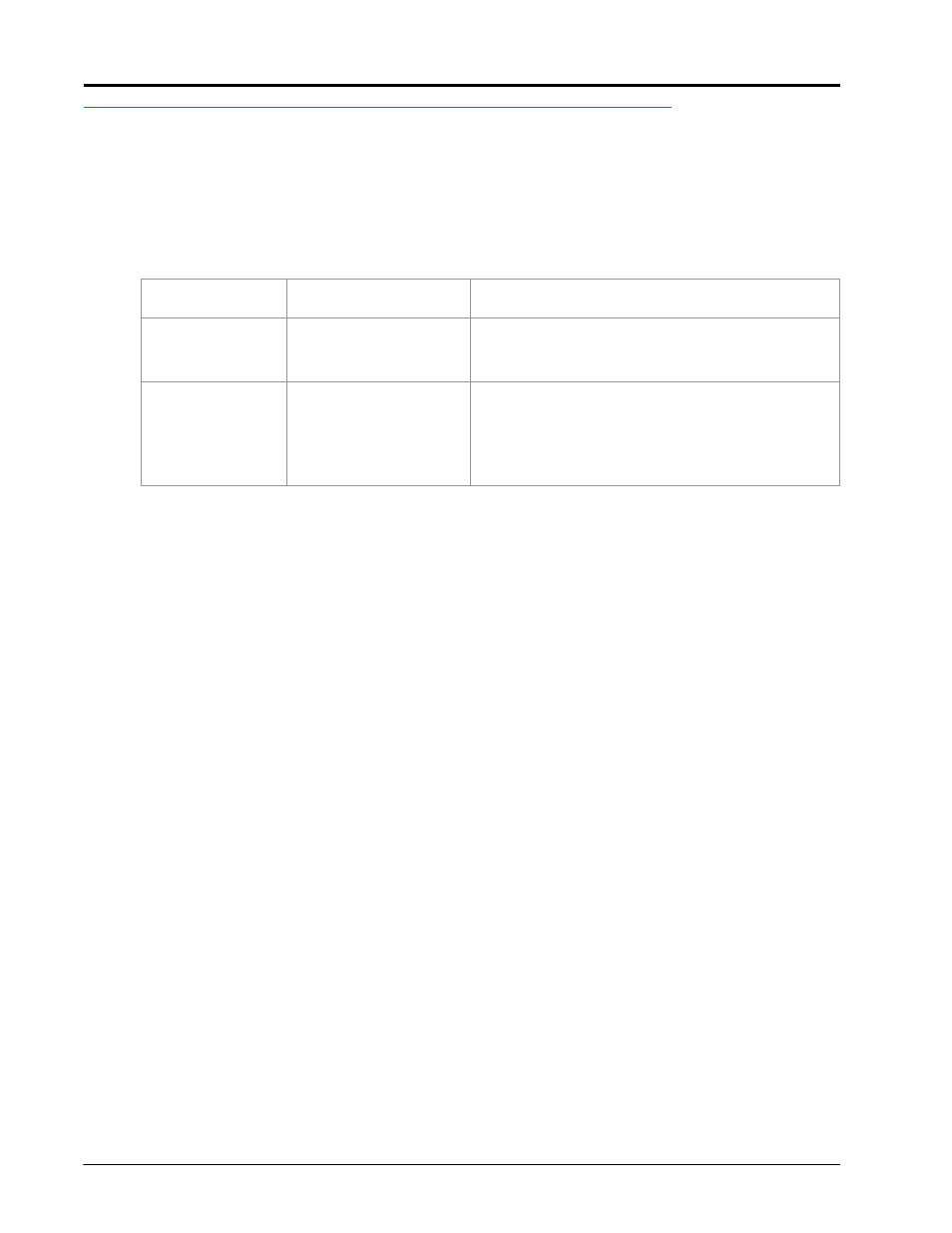
Below are some common causes for communication failures:
Issue
Possible Cause
Solution
CANbus cannot
read the product
node
• The node is not
connected to the CANbus
• Connect the node and re-initialize the Viper Pro to read
the product node.
CANbus ends not
terminated
• Terminate CANbus ends
• Make sure that both ends of the CANbus system are
properly terminated. See Chapter 3, Installation, Start
Up & Registration, for more information.
Note: The first terminator is built into the Seed Hawk
®
switch box mounted in the cab.