Filter time constant, Sensor selection, Sensor backup – Watlow EZ-ZONE RMC User Manual
Page 159: Set point low limit and high limit, Scale high and scale low
Watlow EZ-ZONE
®
RMC Module
•
156
•
Chapter 7 Features
8. Input a Precision Source Low value. Read Elec-
trical Measurement value [`Mu] of controller via
EZ-Configurator or RUI. This will be referred to
as Electrical Measured Low.
Record low value ______________
9. Input a Precision Source High value.
10. Read Electrical Measurement value [`Mu] of
controller via EZ-Configurator or RUI. This will
be referred to as Electrical Measured High.
Record high value ______________
11. Calculated Electrical Input Slope = (Precision
High – Precision Low) / (Electrical Measured High
– Electrical Measured Low)
Calculated Slope value ___________
12. Calculated Electrical Input Offset = Precision
Low – (Electrical Input Slope * Measured Low)
Calculated Offset value ___________
13. Enter the calculated Electrical Input Slope
[ELi;S] and Electrical Input Offset [ELi;o] into
the controller.
14. Exit calibration menu.
15. Validate calibration process by utilizing a calibra-
tor to the analog input.
16. Enter calibration offset as recorded in step 2 if re-
quired to compensate for sensor error.
Setting Electrical Input Slope [ELi;S] to 1.000 and
Electrical Input Offset [ELi;o] to 0.000, restores fac-
tory calibration as shipped from factory.
Filter Time Constant
Filtering smooths an input signal by applying a first-
order filter time constant to the signal. Filtering the
displayed value makes it easier to monitor. Filtering
the signal may improve the performance of PID con-
trol in a noisy or very dynamic system.
Adjust the filter time interval with Filter Time
[`FiL]
(Setup Page, Analog Input Menu). Example:
With a filter value of 0.5 seconds, if the process input
value instantly changes from 0 to 100 and remained at
100, the display will indicate 100 after five time con-
stants of the filter value or 2.5 seconds.
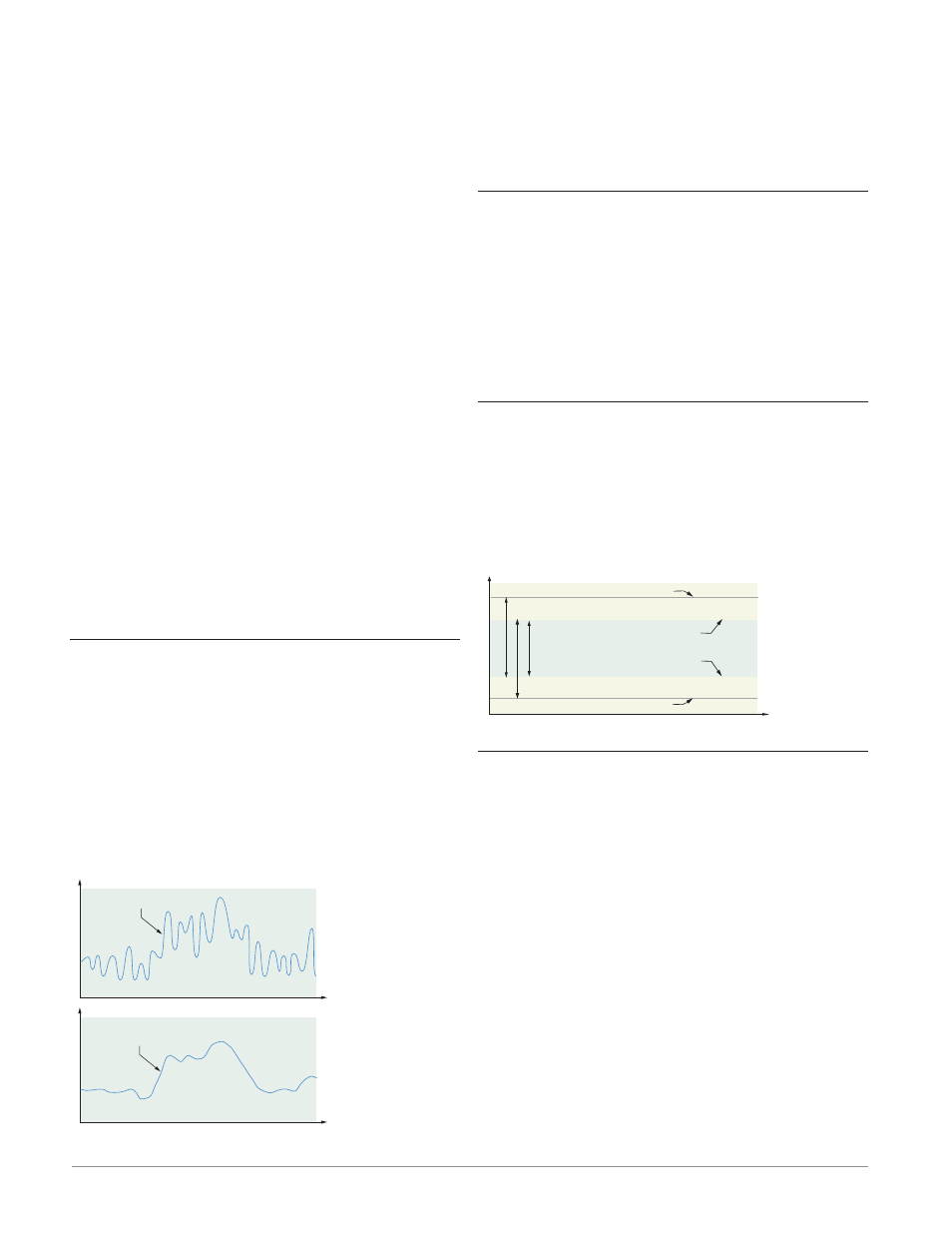
Filter Time Constant
Unfiltered Input Signal
Time
Temperature
Filtered Input Signal
Time
Temperature
Sensor Selection
You need to configure the controller to match the in-
put device, which is normally a thermocouple, RTD or
process transmitter.
Select the sensor type with Sensor Type [`Sen]
(Setup Page, Analog Input Menu).
Sensor Backup
The Process Value function can be set for sensor
backup which would maintain closed-loop control af-
ter an input failure by switching the control input to
another input sensor of choice. Turn sensor backup
on or off via the Setup Page, Process Value Menu.
Source Function A must select a backup sensor from
the same module (zone) where Source Function B
through D can select a sensor as the backup from an-
other zone (module).
Set Point Low Limit and High Limit
The controller constrains the set point to a value be-
tween a set point low limit and a set point high limit.
Set the set point limits with Low Set Point [`L;SP]
and High Set Point [`h;SP] (Setup Page, Loop Menu).
There are two sets of set point low and high lim-
its: one for a closed-loop set point, another for an
open-loop set point.
Set Point Range (must be between Range High and Range Low)
Low Limit of selected functional range
High Limit of selected functional range
Gas Pressure
Range Low and Range High
Range High Range (between High Limit of Sensor and Range Low)
Range Low Range (between Low Limit of Sensor and Range High)
Set Point Low
Set Point High
Scale High and Scale Low
When an analog input is selected as process voltage
or process current input, you must choose the value
of voltage or current to be the low and high ends. For
example, when using a 4 to 20 mA input, the scale
low value would be 4.00 mA and the scale high value
would be 20.00 mA. Commonly used scale ranges are:
0 to 20 mA, 4 to 20 mA, 0 to 5V, 1 to 5V and 0 to 10V.
You can create a scale range representing other
units for special applications. You can reverse scales
from high values to low values for analog input sig-
nals that have a reversed action. For example, if 50
psi causes a 4 mA signal and 10 psi causes a 20 mA
signal.
Scale low and high low values do not have to match
the bounds of the measurement range. These along
with range low and high provide for process scaling
and can include values not measurable by the control-
ler. Regardless of scaling values, the measured value
will be constrained by the electrical measurements of
the hardware.