Yaskawa MotionWorks IEC User Manual
Page 355
PLCopenPlus Function Blocks for Motion Control 2013-04-13
347
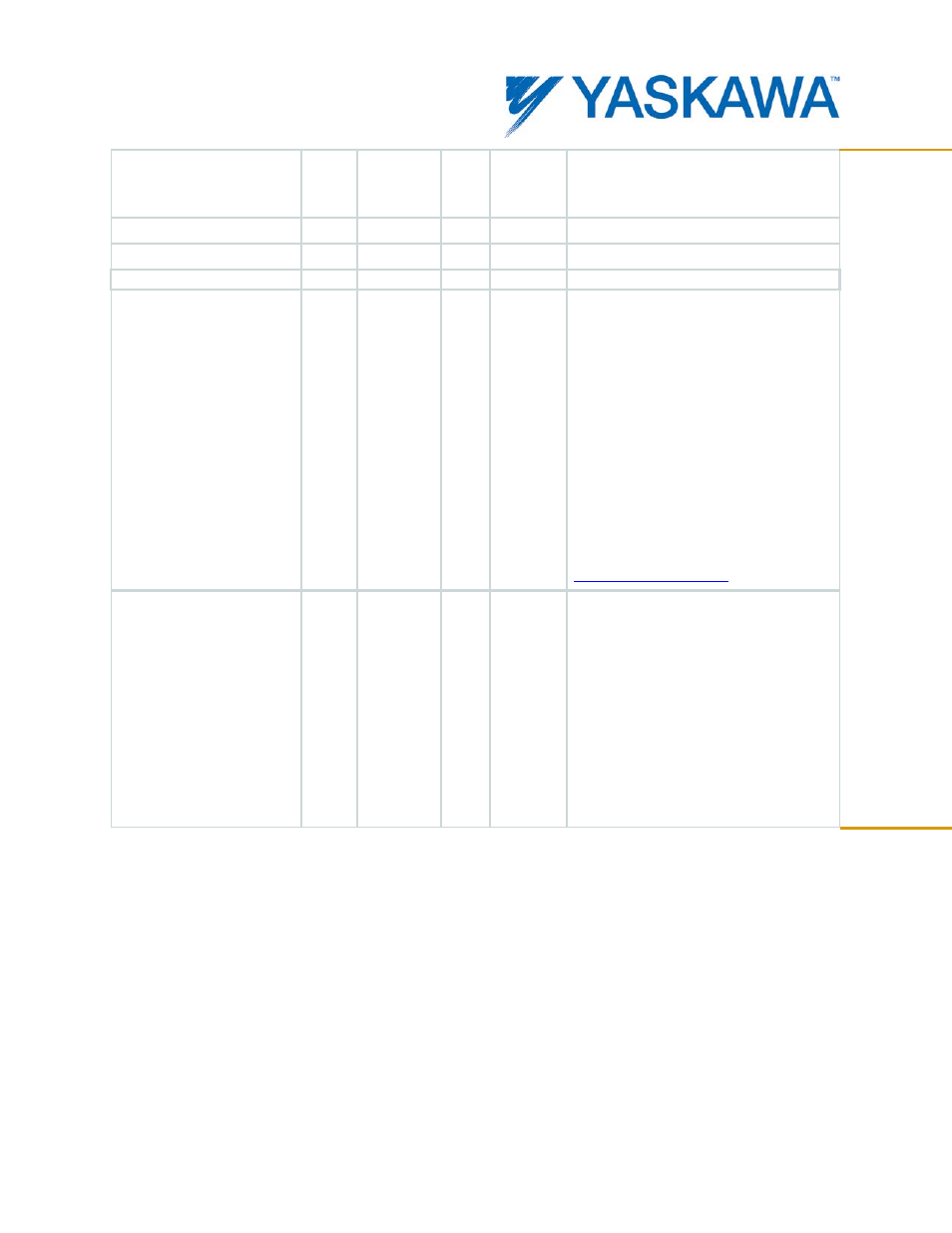
PositionError
1130
LREAL
R
N/A
Position Error, following error, or
difference between commanded and
actual position in user units
PositionScalePerTick
1830
LREAL
R
N/A
User units per encoder count
PositionScalePerRev
1831
LREAL
R
N/A
User units per motor revolution
ScanCompensation
1305
LREAL
W
2 scans
For external encoders only. This value
provides scan compensation to ensure
the master and slave remain
synchronized even at high speeds. Units
are in seconds. The default of 2 scans
was predetermined by Yaskawa and
should not need adjustment in most
cases. The maximum compensation is
10 MECHATROLINK scans. For example,
if the MECHATROLINK update is 2 ms,
then parameter 1305 can range from 0
to 0.020000 seconds). Firmware
Version 1.2.2 is required. Refer to the
VelocityFilter
1306
LREAL
R/W 0.0
Provides a moving average filter for the
feedback velocity over a specified time
period. Units are in seconds. Note that
the time value will be rounded to the
nearest number of MECHATROLINK or
DPR scans. For example, if the
MECHATROLINK is set for 2.0 ms, and
the VelocityFilter is set to 0.010, then
the velocity will be averaged over 5
samples. The maximum filter time is
0.100 seconds.