Yaskawa MotionWorks IEC User Manual
Page 351
PLCopenPlus Function Blocks for Motion Control 2013-04-13
343
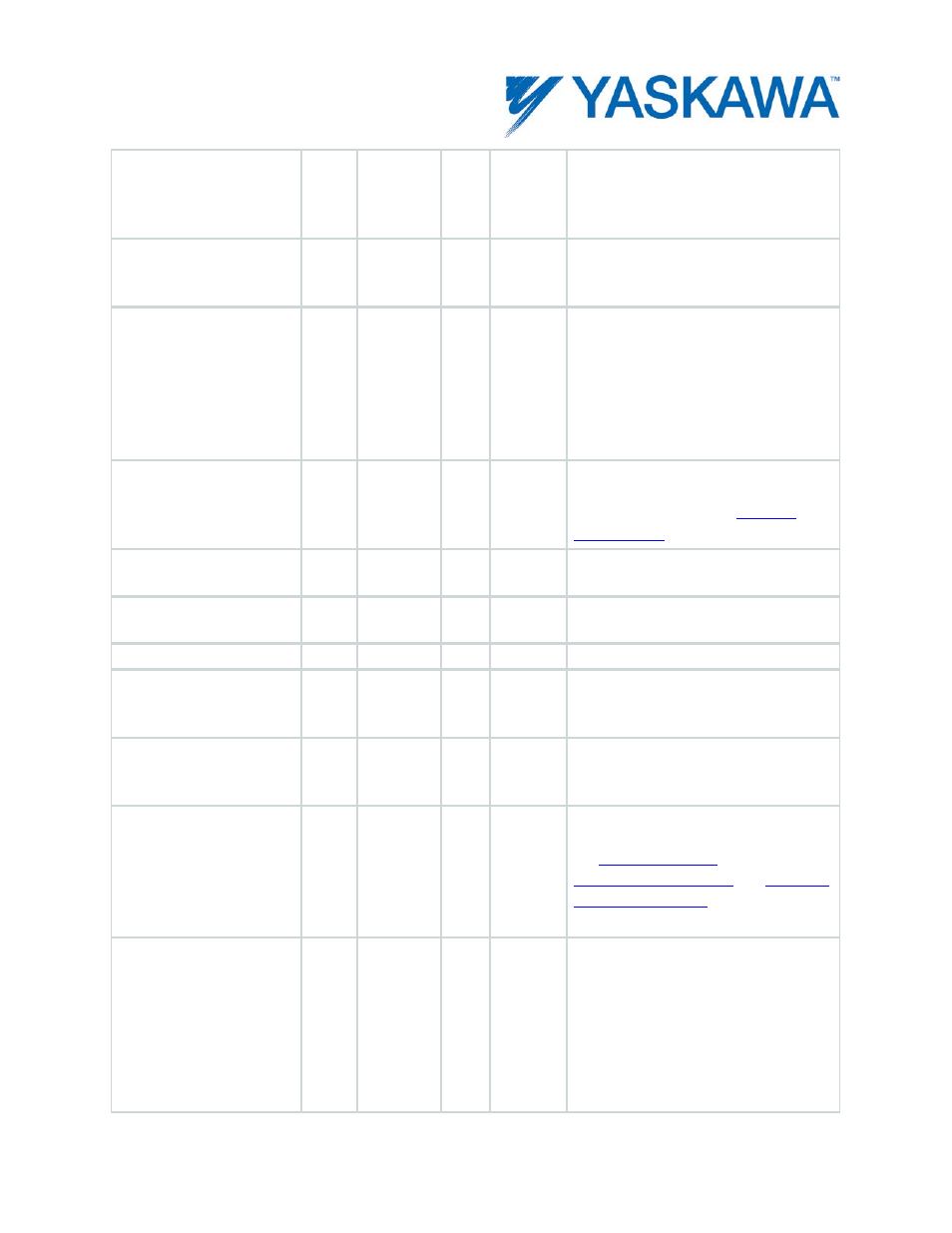
section of this manual. 0 = Not
Engaged, 1 = Waiting to Engage, 2 =
Engaging, 3 = Engaged, 4 = Waiting to
Disengage, 5 = Disengaging
CamTableCumulative
Output
1521
LREAL
R
N/A
Initialized to 0 when the cam first
engages and represents the total
commanded slave distance traveled.
CamTableIDEngaged
1541
LREAL
R
0
Indicates the cam table currently in use
by the motion engine. This number
becomes valid when the CamState
changes from 0 to 1. If a cam is already
engaged (CamState = 3), this number
becomes valid when the new table
becomes engaged.
CamTableOutput
1520
LREAL
R
N/A
This is the table value selected as the
synchronized position based on the
master position. See the
CommandedAcceleration
1012
LREAL
R
N/A
Commanded acceleration in user units
/second
2
.
CommandedAcceleration
Filtered
1022
LREAL
R
N/A
Commanded acceleration in user units
/second
2
(Post S-curve filter.)
CommandedPosition
1010
LREAL
R
N/A
Commanded position in user units.
CommandedPositionCyclic
1015
LREAL
R
N/A
If axis is set to rotary type, this value
reports the position from 0 to
MachineCycle.
CommandedPosition
NonCyclic
1016
LREAL
R
N/A
Reports the unmodularized commanded
position regardless of whether the axis is
configured as rotary or linear.
CommandedPosition
NonCyclicFiltered
1020
LREAL
R
N/A
Commanded Position sent to the
servopack (Post S-curve filter.) Refer to
the
and
details
CommandedPosition
SubFilter
1311
LREAL
R
N/A
Configures the servo amplifier to
interpolate intermediate points in the
motion profile between MECHATROLINK
updates from the controller. This
provides for a smoother motion
profile. Settings are as follows: 0 = No
interpolation; 1 =
Exponential interpolation; 2 = Moving