Notes – Yaskawa MotionWorks IEC User Manual
Page 263
PLCopenPlus Function Blocks for Motion Control 2013-04-13
255
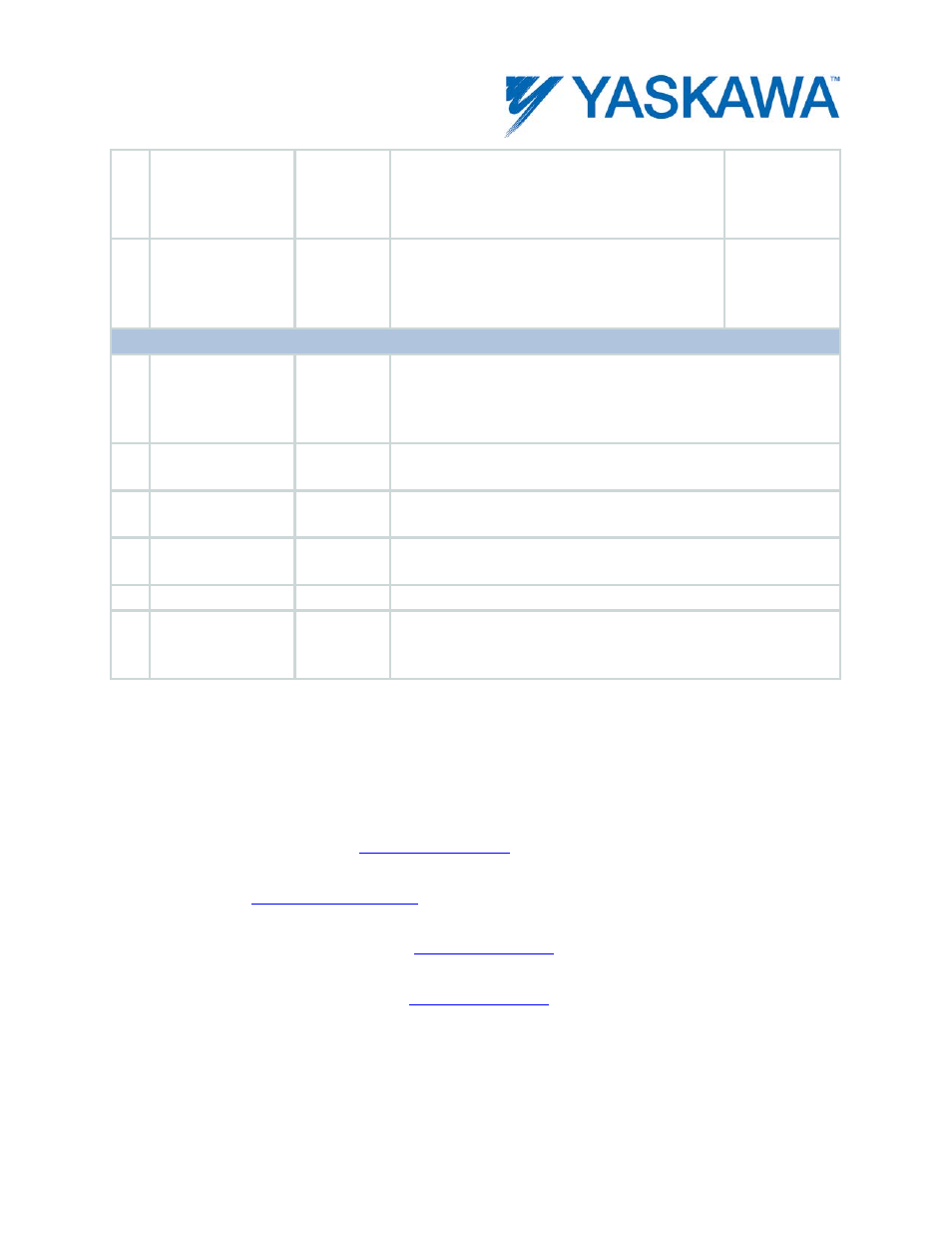
amplifiers are displayed in hex in all
documentation. For consistency, the
ParameterNumber can be entered in hex as
shown in the example below.
V
DataTypeOverride
INT
Enumeration with the following values: 0 =
default (i.e., fetched from the parameter XML
file.); 1 = UINT; 2 = UDINT; 3 = INT; 4 =
DINT.
INT#0
VAR_OUTPUT
B
Done
BOOL
Set high when the commanded action has been completed
successfully. If another block takes control before the action is
completed, the Done output will not be set. This output is reset
when execute goes low.
B
Busy
BOOL
Set high upon the rising edge of the 'Execute' or 'Enable' input,
and reset if Done, CommandAborted, or Error is true.
B
Error
BOOL
Set high if error has occurred during the execution of the function
block. This output is cleared when 'Execute' or 'Enable' goes low.
E
ErrorID
UINT
If error is true, this output provides the Error ID. This output is
reset when 'Execute' or 'Enable' goes low.
V
Value
DINT
The drive parameter value
V
DataType
INT
Enumeration with the following values: 0 = default (i.e., fetched
from the parameter XML file.); 1 = UINT; 2 = UDINT; 3 = INT; 4
= DINT.
Notes
Use the links below to access the ServoPack manuals on
www.yaskawa.com to view the list of parameters.
• Sigma II with NS115
ee Appendix B 1
• Sigma III
see section 11.2.2
• Sigma-5 with rotary motor:
ee Section 10.1.2
• Sigma-5 with linear motor
ee Section 9.1.2