Yaskawa MotionWorks IEC User Manual
Page 242
PLCopenPlus Function Blocks for Motion Control 2013-04-13
234
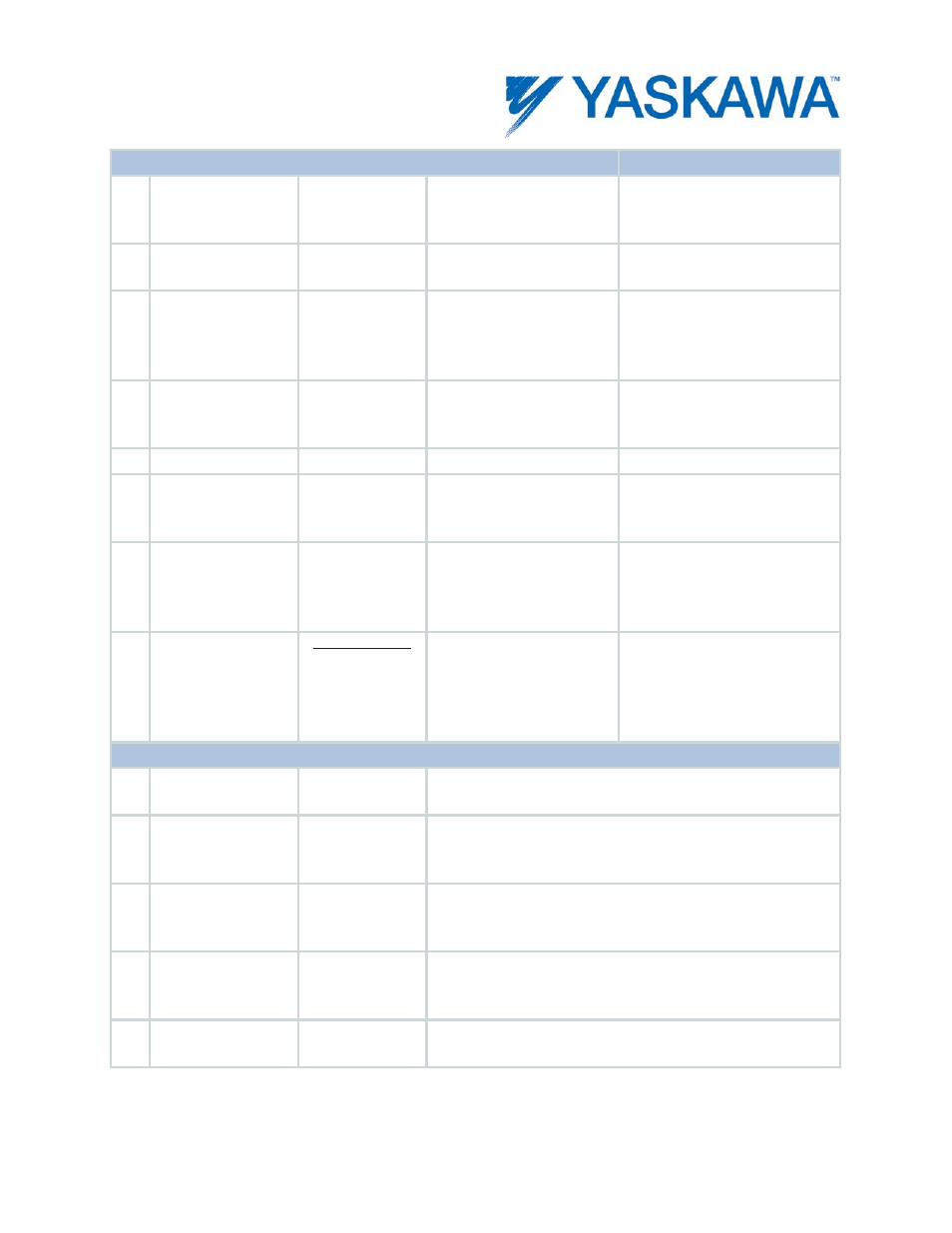
VAR_INPUT
Default
B
Enable
BOOL
The function will continue
to execute while enable
is held high.
FALSE
B
ControlMode
INT
ControlMode: 1=position,
2=velocity, 3=torque
INT#0
E
Position
LREAL
A positive or negative
value within the
coordinate system in
user units.
LREAL#0.0
E
Velocity
LREAL
Velocity in user
units/second. See notes
below.
LREAL#0.0
E
Acceleration
LREAL
Not supported
--
E
Torque
LREAL
Value of the torque (in
percentage of rated
torque)
LREAL
E
FilterTimeConstant
LREAL
Moving average filter
specified in
seconds. See below for
details.
LREAL#0.0 (No Filter)
V
BufferMode
The behavior of the axis
could be Aborting or
Buffered
MC_BufferMode#Aborting
MC_BufferMode#Buffered
MC_BufferMode#Aborting
VAR_OUTPUT
E
Busy
BOOL
Set high upon the rising edge of the 'Execute' or 'Enable'
input, and reset if Done, CommandAborted, or Error is true.
E
Active
BOOL
For buffered modes, this output is set high at the moment
the block takes control of the axis. For non buffered modes,
the outputs Busy and Active have the same value.
E
CommandAborted
BOOL
Set high if motion is aborted by another motion command or
MC_Stop. This output is cleared with the same behavior as
the Done output.
B
Error
BOOL
Set high if error has occurred during the execution of the
function block. This output is cleared when 'Execute' or
'Enable' goes low.
E
ErrorID
UINT
If error is true, this output provides the Error ID. This output
is reset when 'Execute' or 'Enable' goes low.