Yaskawa MotionWorks IEC User Manual
Page 352
PLCopenPlus Function Blocks for Motion Control 2013-04-13
344
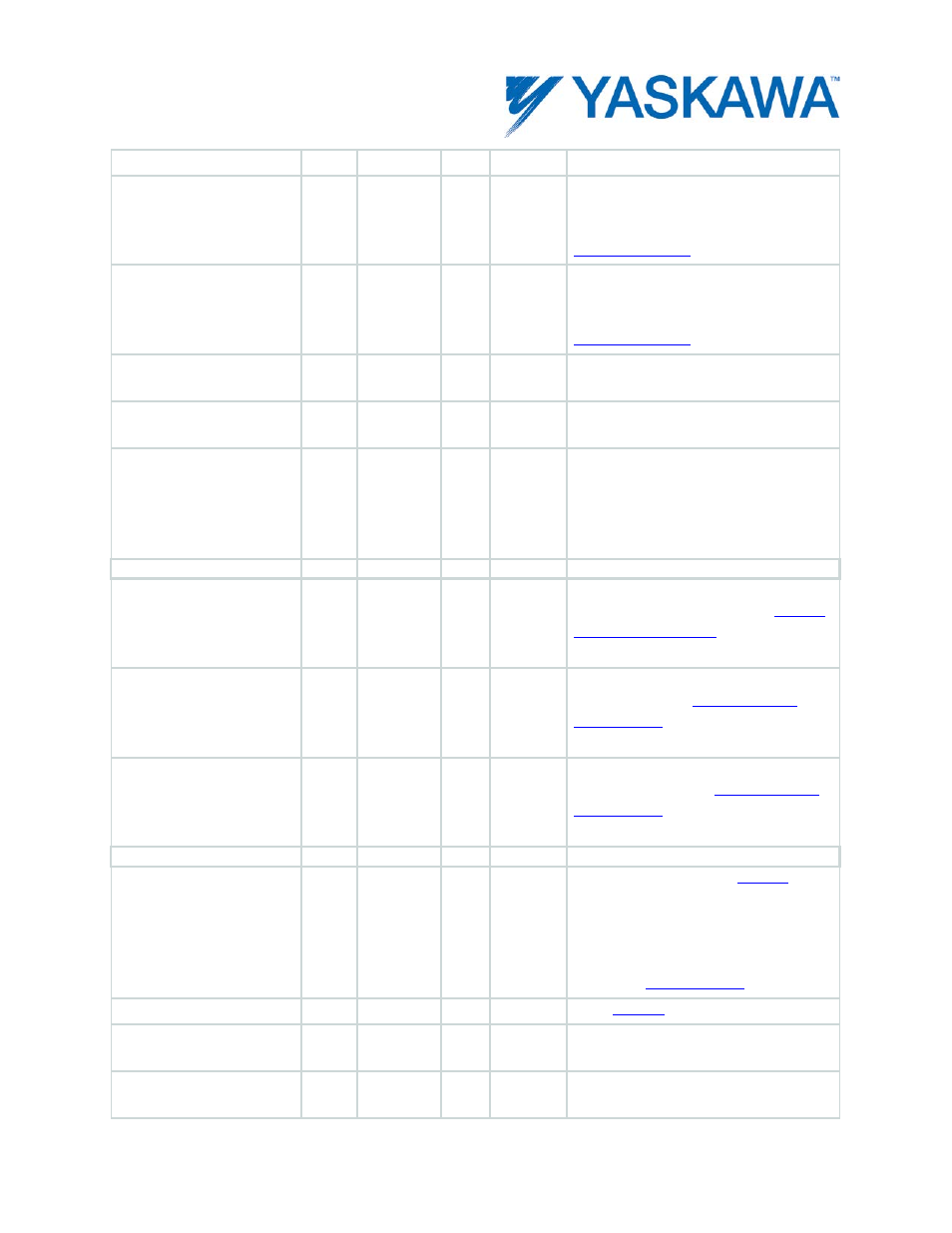
average filter.
CommandedTorque
1014
LREAL
R
N/A
Commanded torque in percentage of
rated torque. Valid only when
commanding a torque using
CommandedTorqueFiltered 1024
LREAL
R
N/A
Commanded torque in percentage of
rated torque. Valid only when
commanding a torque using
CommandedVelocity
1011
LREAL
R
N/A
Commanded velocity in user units /
second.
CommandedVelocityFiltered 1021
LREAL
R
N/A
Commanded velocity in user units /
second. (Post S-curve filter.)
ControllerFeedForward
Enable
1310
BOOL
R/W TRUE
Alternative of servo amplifier's Pn109
parameter. User can enable this gain in
either the controller of servo
amplifier. Both settings are not
recommended simultaneously.
ExternalRawPositionCyclic
1007
LREAL
R
N/A
Applicable for External Encoder set in
rotary mode only. Refer to the
(Requires FW version 1.2.3 or higher)
ExternalRawPositionNon
Cyclic
1008
LREAL
R
N/A
Applicable for External Encoder
only. Refer to the
version 1.2.3 or higher)
ExternalVelocityUnfiltered
1009
LREAL
R
N/A
Instantaneous external encoder
velocity. Refer to the
version 1.2.3 or higher)
FilterMovingAverage
1301
LREAL
R/W
constant. The units are seconds, and the
range is 0.0 to 5.0 ( Zero
exclusive). This parameter should only
be written if the axis is in the "Standstill"
state. Use
FilterMovingAverageEnable 1300
BOOL
R/W
HighSpeedOutputEnable
1050
BOOL
R/W FALSE
Set TRUE to arm or toggle to re-arm the
external encoder high speed output.
HighSpeedOutputPosition
1052
LREAL
R/W 0.0
Set this value before the high speed
output function is enabled.