Gripper offset table – Adept AdeptSight User Guide User Manual
Page 199
Gripper Offset Table
NOTE: A gripper offset is not always needed to pick a part, so you may not need to build a
Gripper Offset Table for your application.
The Gripper Offset Table:
l
Tells the robot where, in relation to the origin of a part, it must grip the part.
l
Describes a transform, expressed as: (x, y, z, yaw, pitch, roll).
NOTE: A part can have more than one Gripper Offset (if it can be picked at more
than one spot).
l
Contains offset data used by V+ or MicroV+.
l
Is assigned to a robot. No robot can have more than one table.
These instructions also apply in Emulation Mode.
To open the Gripper Offset Table, right-click in the Tree structure, then select:
New > Vision > AdeptSight > Gripper Offset Table
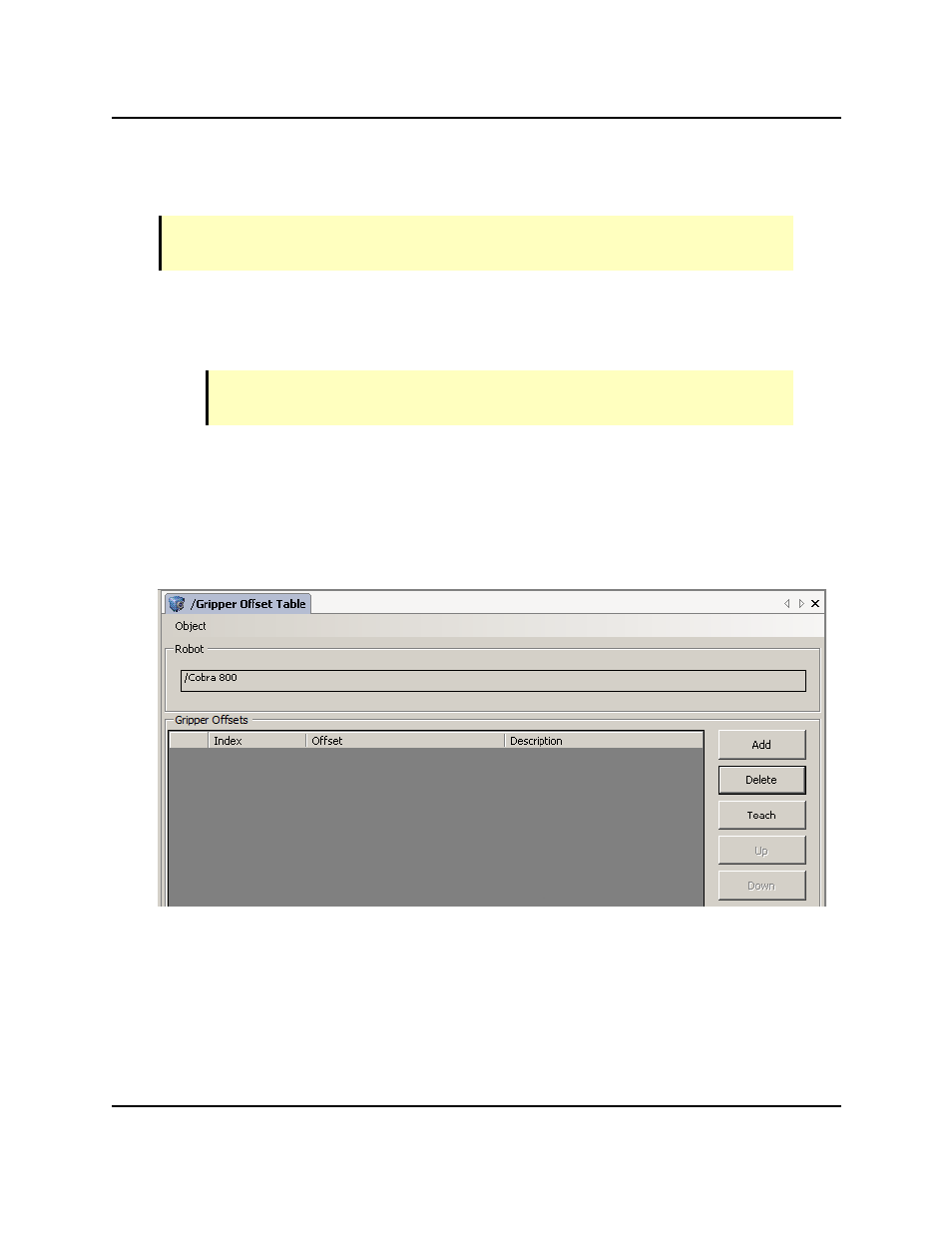
The Gripper Offset Table Initial Screen
Object Editor
The Object Editor screen starts by asking for the robot that this table is to be assigned to.
Gripper Offset Table
AdeptSight User's Guide, Version 3.2.x, Updated: 8/23/2012
Page 199