Results, Related topics – Adept AdeptSight User Guide User Manual
Page 196
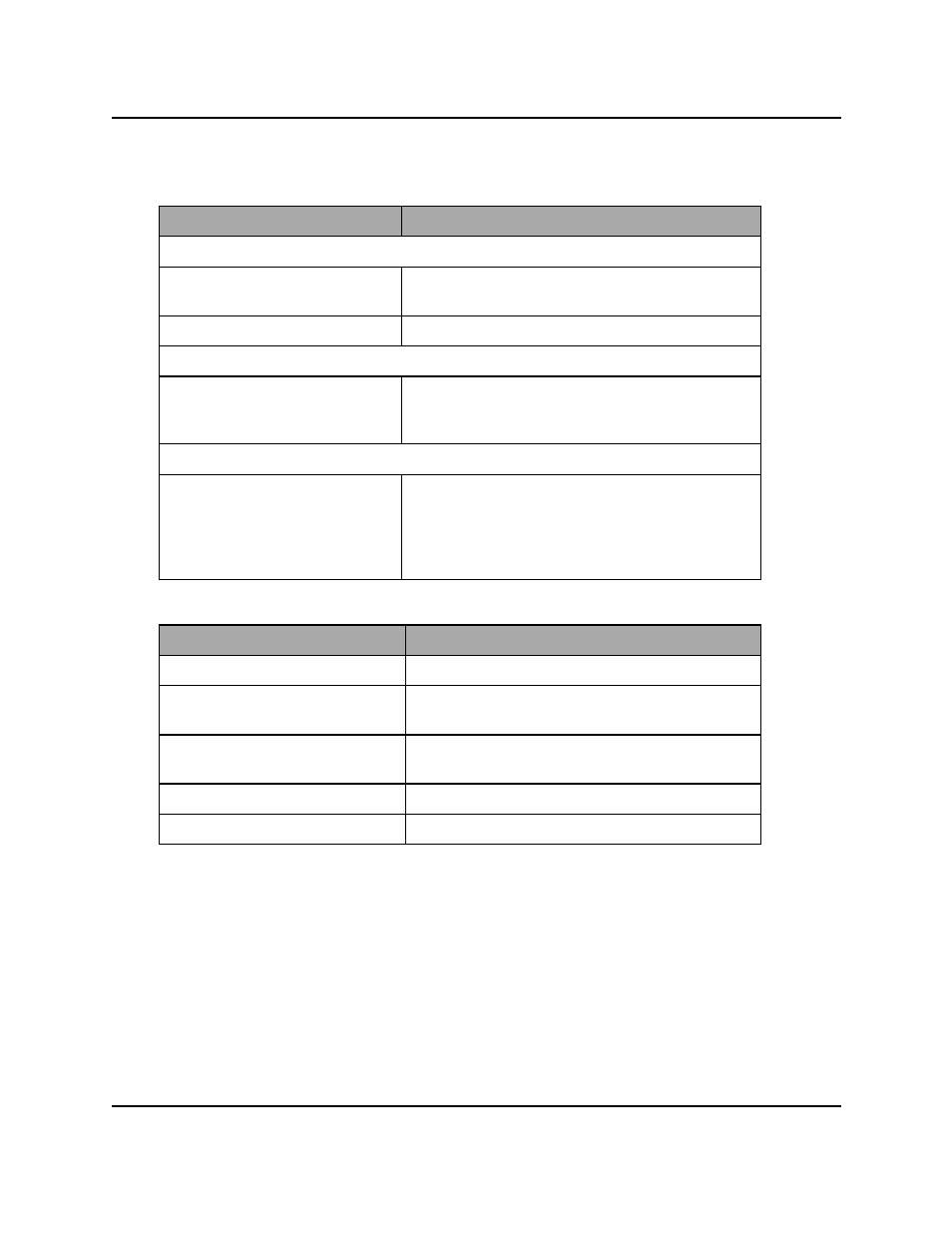
Results
Configuration
Object
Description
Properties
Calibration
The robot-to-belt camera calibrations to use for
the calculations
Distance
The minimum distance required between parts
Region of Interest (ROI)
Relative To
Specifies the tool that will provide the input to this
tool. The tool can be dragged from the Folder pane
and dropped into this field.
Advanced
Is Running In Sequence
If the tool is running in a sequence, it will read the
required latches and update the internal tracking
structures. If not running in a sequence, the
latches are not read, and the results are not
tracked.
Results
Object
Description
Instance
Index of the result instance, starting with 0
Position X
The X coordinate of the origin of the located
instance
Position Y
The Y coordinate of the origin of the located
instance
Angle
The angle of the located instance
Group
The group index of the located instance
Related Topics
Communication Tool on page 183
AdeptSight User's Guide, Version 3.2.x, Updated: 8/23/2012
Page 196