10 standardisation of setpoint/actual values – NORD Drivesystems BU0200 User Manual
Page 298
9 Additional Information
BU 0200 GB-4411
Subject to technical alterations
297
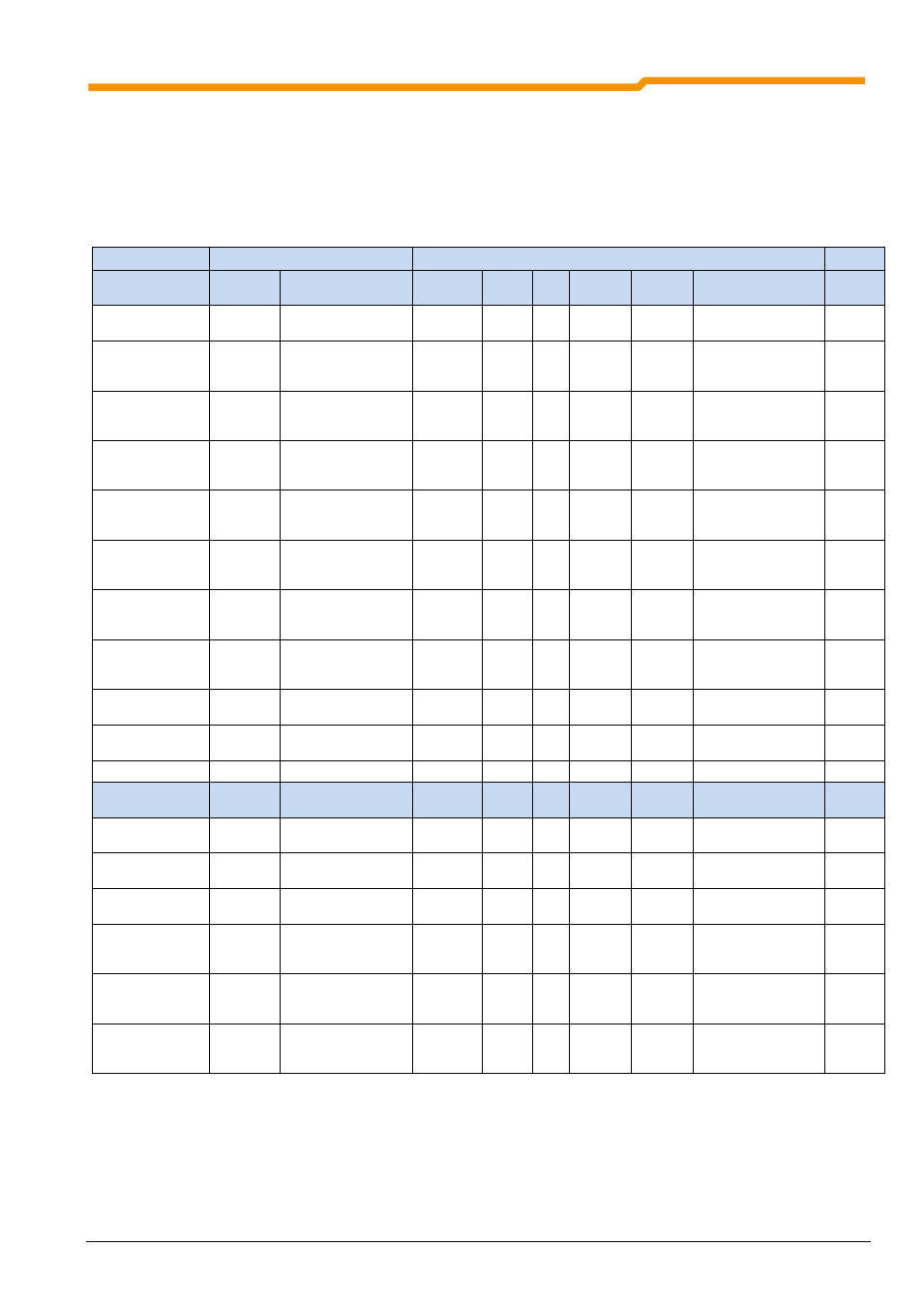
9.10 Standardisation of setpoint/actual values
The following table contains details for the standardisation of typical setpoint and actual values. This
information relates to the parameters (P400), (P418), (P543), (P546), (P740) or (P741).
Name
Analog signal
Bus signal
Setpoint
{Function}
Value
range
Standardisation
Value
range
Max.
value
Type 100% =
-100% =
Standardisation
Limit
absolute
Setpoint frequency
{01}
0-10V
(10V=100%)
P104 … P105
(min - max)
±100%
16384
INT 4000
hex
16384
dec
C000
hex
-
16385
dec
4000
hex
*
s
etpoint
[Hz]/P105
P105
Frequency
addition
{02}
0-10V
(10V=100%)
P410 … P411
(min - max)
±200%
32767
INT 4000
hex
16384
dec
C000
hex
-
16385
dec
4000
hex
*
s
etpoint
[Hz]/P411
P105
Frequency
subtraction
{03}
0-10V
(10V=100%)
P410 … P411
(min - max)
±200%
32767
INT 4000
hex
16384
dec
C000
hex
-
16385
dec
4000
hex
*
s
etpoint
[Hz]/P411
P105
Minimum
frequency
{04}
0-10V
(10V=100%)
50Hz*
U
AIN
(V)/10V
0…200% 32767 INT 4000
hex
16384
dec
/
50Hz*
Bus setpoint/4000
hex
P105
Maximum
frequency
{05}
0-10V
(10V=100%)
100Hz*
U
AIN
(V)/10V
0…200% 32767 INT 4000
hex
16384
dec
/
100Hz*
Bus setpoint/4000
hex
P105
Actual value
Process controller
{06}
0-10V
(10V=100%)
P105*
U
AIN
(V)/10V
±100%
16384
INT 4000
hex
16384
dec
C000
hex
-
16385
dec
4000
hex
*
s
etpoint
[Hz]/P105
P105
Setpoint
Process controller
{07}
0-10V
(10V=100%)
P105*
U
AIN
(V)/10V
±100%
16384
INT 4000
hex
16384
dec
C000
hex
-
16385
dec
4000
hex
*
s
etpoint
[Hz]/P105
P105
Torque current
limit
{11}, {12}
0-10V
(10V=100%)
P112*
U
AIN
(V)/10V
0…100% 16384 INT 4000
hex
16384
dec
/
4000
hex
* I[A]/P112
P112
Current limit
{13}, {14}
0-10V
(10V=100%)
P536*
U
AIN
(V)/10V
0…100% 16384 INT 4000
hex
16384
dec
/
4000
hex
* I[A]/P536
P536
Ramp time
{15}
0-10V
(10V=100%)
10s*
U
AIN
(V)/10V
0…200% 32767 INT 4000
hex
16384
dec
/
10s *
Bus setpoint/4000
hex
20s
Actual values
{Function}
Actual frequency
{01}
0-10V
(10V=100%)
P201*
U
AOut
(V)/10V
±100%
16384
INT 4000
hex
16384
dec
C000
hex
-
16385
dec
4000
hex
*
f[Hz]/P201
Speed
{02}
0-10V
(10V=100%)
P202*
U
AOut
(V)/10V
±200%
32767
INT 4000
hex
16384
dec
C000
hex
-
16385
dec
4000
hex
*
n[rpm]/P202
Current
{03}
0-10V
(10V=100%)
P203*
U
AOut
(V)/10V
±200%
32767
INT 4000
hex
16384
dec
C000
hex
-
16385
dec
4000
hex
*
f[Hz]/P105
Torque current
{04}
0-10V
(10V=100%)
P112* 100/
√((P203)²+(P209)²)*
U
AOut
(V)/10V
±200%
32767
INT 4000
hex
16384
dec
C000
hex
-
16385
dec
4000
hex
*
I
q
[A]/(P112)*100/
√((P203)²+(P209)²)
Master value
setpoint frequency
{19} … {24}
0-10V
(10V=100%)
P105*
U
AOut
(V)/10V
±100%
16384
INT 4000
hex
16384
dec
C000
hex
-
16385
dec
4000
hex
* f[Hz]/P105
Speed from
speed encoder
{22}
/
/
±200%
32767
INT 4000
hex
16384
dec
C000
hex
-
16385
dec
4000
hex
* n[rpm]/
P201 * (60/number
of pole pairs)