8 ethercat, sk tu4-ect(-c), Ethercat, sk tu4-ect(-c) – NORD Drivesystems BU0200 User Manual
Page 123
SK 200E Manual for frequency inverters
122
Subject to technical alterations
BU 0200 GB-4411
3.5.8
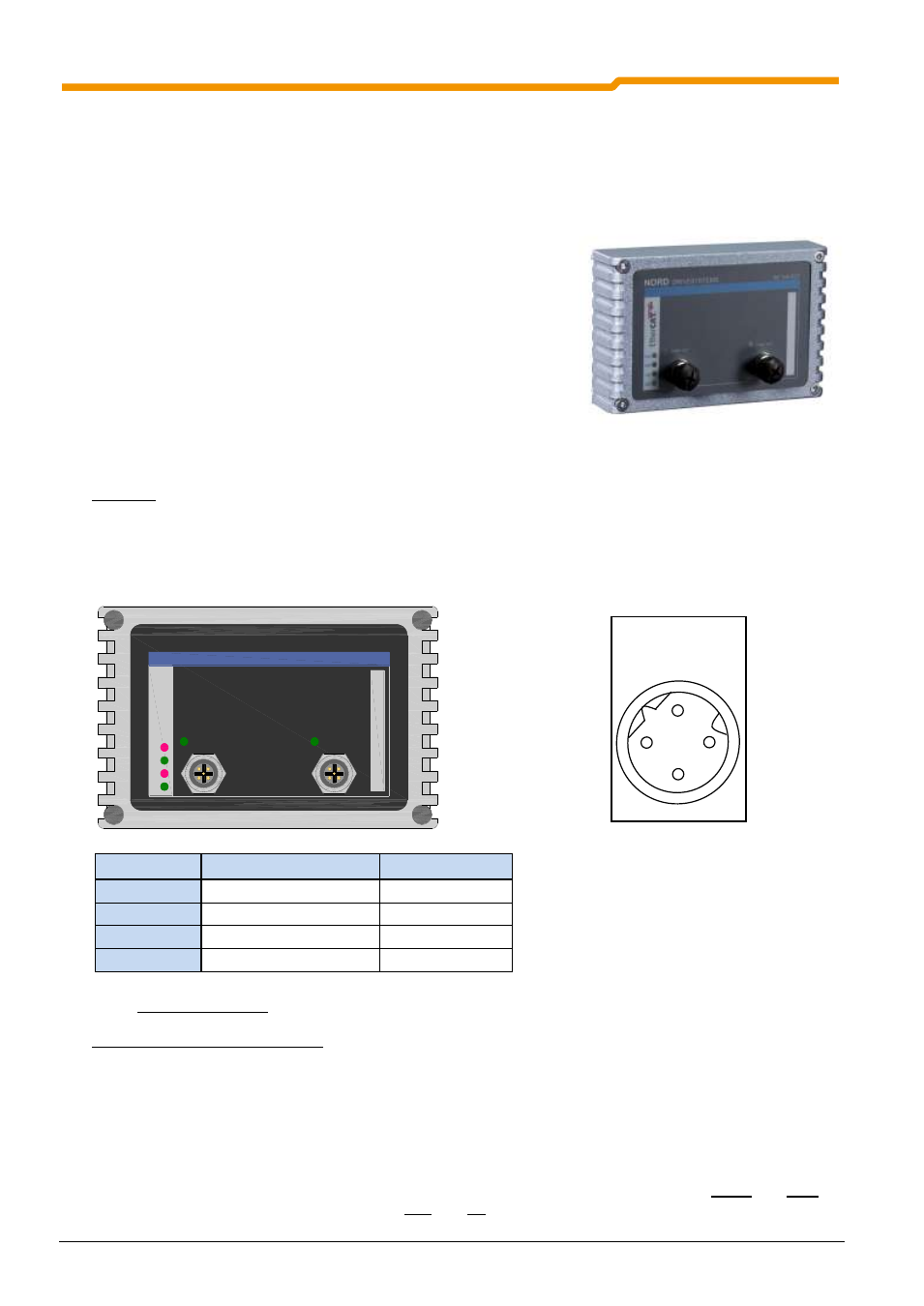
EtherCAT, SK TU4-ECT(-C)
Up to 4 connected frequency inverters can be managed via EtherCAT® using the external EtherCAT
module (control, status report, parameterisation and diagnosis).
•
Baud rate: max. 100 MBaud
•
Profile CoE
•
8x digital inputs
•
2x digital outputs
•
DIP switches for: 2nd address mode
•
Status LEDs: Module status, module error, bus status,
bus error, 2x EtherCat physical status
Control connections of the SK TU4-ECT(-C)
Field bus
The field bus cable must only be connected to the two M12 sockets mounted on the front. Care must be
taken that the incoming bus cable is connected to the "In" socket and that the outgoing cable is connected
to the "Out" socket. If this is the last participant, the "Out" socket must be left vacant. A termination resistor
is not necessary.
DS
DE
RUN
ERR
Et
herC
A
T
SK TU4-ECT
NORD
DRIVESYSTEMS
IN
OUT
Peripherals (system bus and IOs)
The EtherCAT modules must be provided with a 24V DC (±20%, 100mA) control voltage. Wire end sleeves
must be used for flexible cables.
The double spring BUS terminal bar is divided into 2 potential levels (system bus and digital outputs).
Terminals 1/2/9/10 are connected to Terminal 11 via a DC/DC converter. As the DC/DC converter is located
in the bus module, there is only a connection to Terminals 1/2/9/10 and e.g. 11 if the bus module and the
connection unit are screwed together.
A separate power source should be used for the supply of the DOs. However, by bridging 24V 2 and 0V 2 to
one of the terminals of the system bus level (24V and 0V) it is possible to implement the supply of the DOs.
Signal
Name
M12 D-code 4-pin
TX+
Transmission Data +
1
TX-
Transmission Data -
3
RX+
Receive Data +
2
RX-
Receive Data -
4
2
Socket details
Pin numbering
1
4
3
M12 socket assignment