Program examples – IAI America XSEL-KX User Manual
Page 290
274
Part 4 Commands
5. Program Examples
(1) Program example using PAPS (set by 3-point teaching)
The example below specifies movement only and does not cover picking operation.
Step
E
N
Cnd
Cmnd
Operand 1
Operand 2
Pst
Comment
1
VELS
80
PTP travel speed: 80%
2
ACCS
50
PTP travel acceleration: 50%
3
DCLS
50
PTP travel deceleration: 50%
4
VEL
100
CP travel speed: 100 mm/sec
5
ACC
0.3
CP travel acceleration: 0.3 G
6
DCL
0.3
CP travel deceleration: 0.3 G
7
SLWK
0
Select load coordinate system No. 0.
8
SLTL
0
Select tool coordinate system No. 0.
9
10
BGPA
1
Start setting palletizing No. 1.
11
PAPI
5
7
Palletizing counts: 5 x 7
12
PAPS
101
Set by 3-point teaching.
13
PEXT
104
Set palletizing R-axis coordinate.
14
PSLI
20
4
Zigzag offset = 20 mm
15
PAPN
1
Palletizing pattern 1
16
PCHZ
3
Palletizing Z-axis = Axis 3
17
PTRG
105
105
Set palletizing arch triggers.
18
OFPZ
5
PZ-axis offset = 5 mm
19
EDPA
20
21
ATRG
105
105
Set arch triggers.
22
ACHZ
3
Arch-motion Z-axis = Axis 3
23
24
PTPL
Perform positioning in PTP mode using left arm.
25
MOVP
110
Move to picking position in PTP mode.
26
PSET
1
1
Set palletizing position number to 1.
27
TAG
1
Beginning of loop processing
28
PACH
1
106
Palletizing arch motion
29
ARCH
110
106
Arch motion
30
PINC
1
600
Increment palletizing position number by 1.
31
600
GOTO
1
Beginning of loop when PINC is successful.
32
MOVL
109
Move to standby position in CP mode.
33
EXIT
End
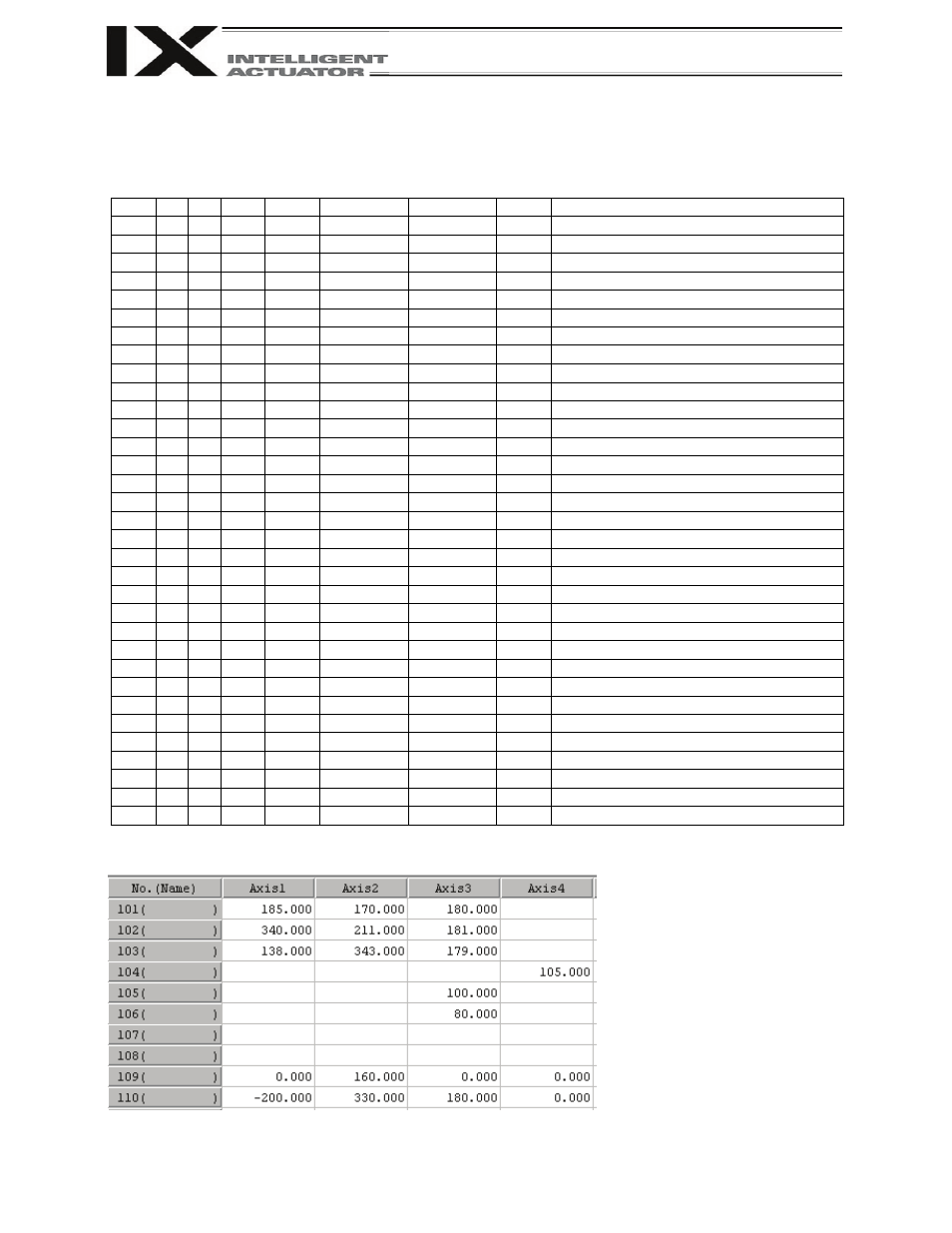
Position data (Stroke with arm length 500)
Reference-point position
PX-axis end point
PY-axis end point
Palletizing R-axis position
Arch/palletizing trigger position
Highest position (Z point)
Standby position
Pickup position