IAI America XSEL-KX User Manual
Page 268
252
Part 4 Commands
(1) Setting the tool coordinate system
Set the offsets from the center of the tool-mounting surface to the tool tip.
• Setting example of tool coordinate system
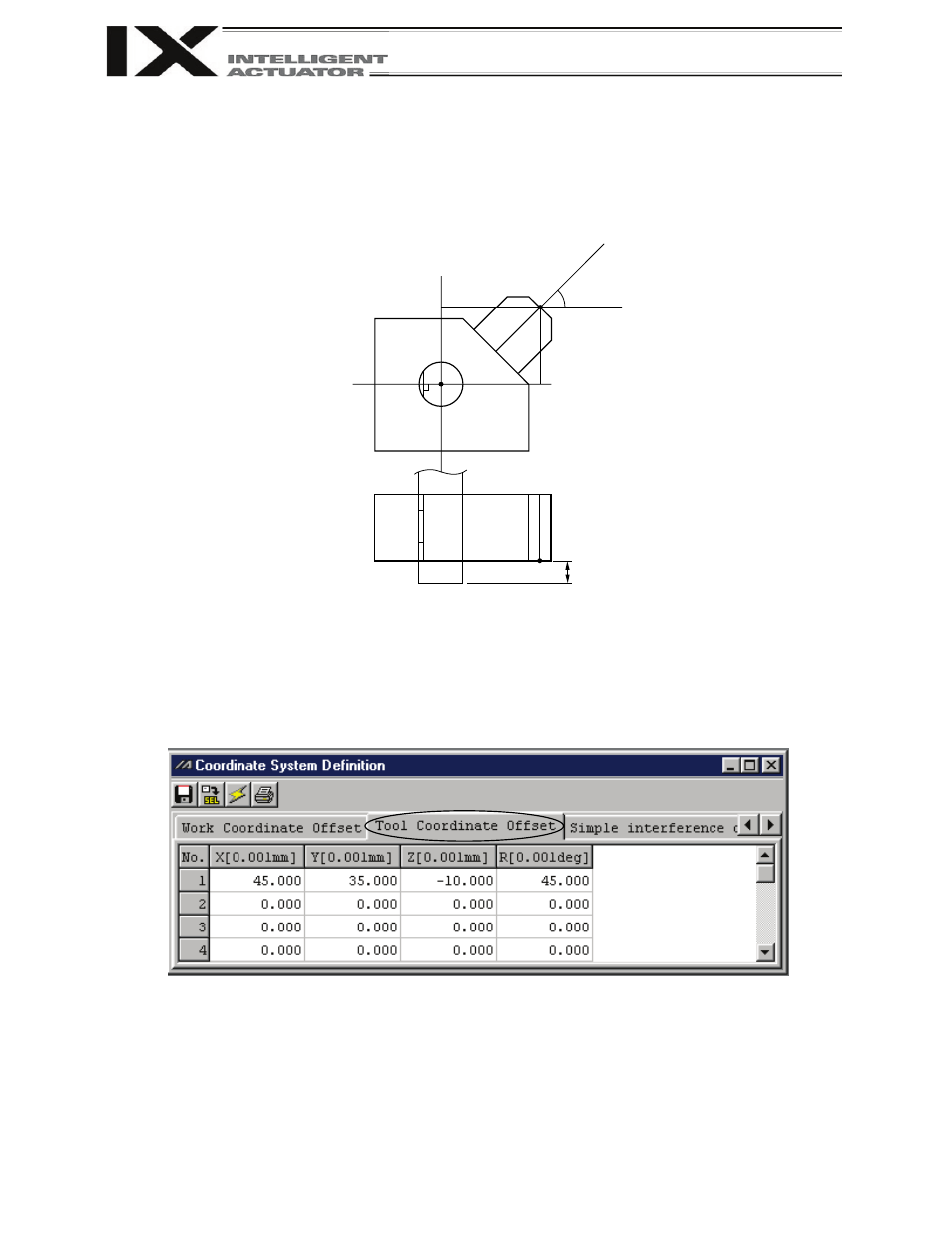
When defining tool coordinate system No. 1 as shown below:
The offsets of tool coordinate system No. 1 are set as Xoft1 = 45, Yoft1 = 35, Zoft1 = -10 and Roft1
= 45.
The figure below shows the edit screen for tool coordinate system definition data on the PC
software for horizontal articulated robot, where tool coordinate system No. 1 is set:
* Use a DFTL command to set tool coordinate system offsets in a SEL program.
35
0
45
°
45
10
This manual is related to the following products: