Continuous movement commands, Chapter 4 – IAI America XSEL-KX User Manual
Page 278
262
Part 4 Commands
Chapter 4 Key Characteristics of Actuator Control Commands and Points to
Note
1. Continuous Movement Commands
[PATH, PSPL, CIR2, ARC2, CIRS, ARCS, ARCD, ARCC, CIR, ARC]
[1] By running a program with continuous movement commands input in a series of continuous
program steps, you can allow the actuators to perform operations continuously without stopping
between steps.
PATH
1
5
ARC2
6
7
PATH
8
12
[2] Continuous movement will not be achieved if an input condition is specified for any continuous
movement command.
PATH
1
5
20
ARC2
6
7
PATH
8
12
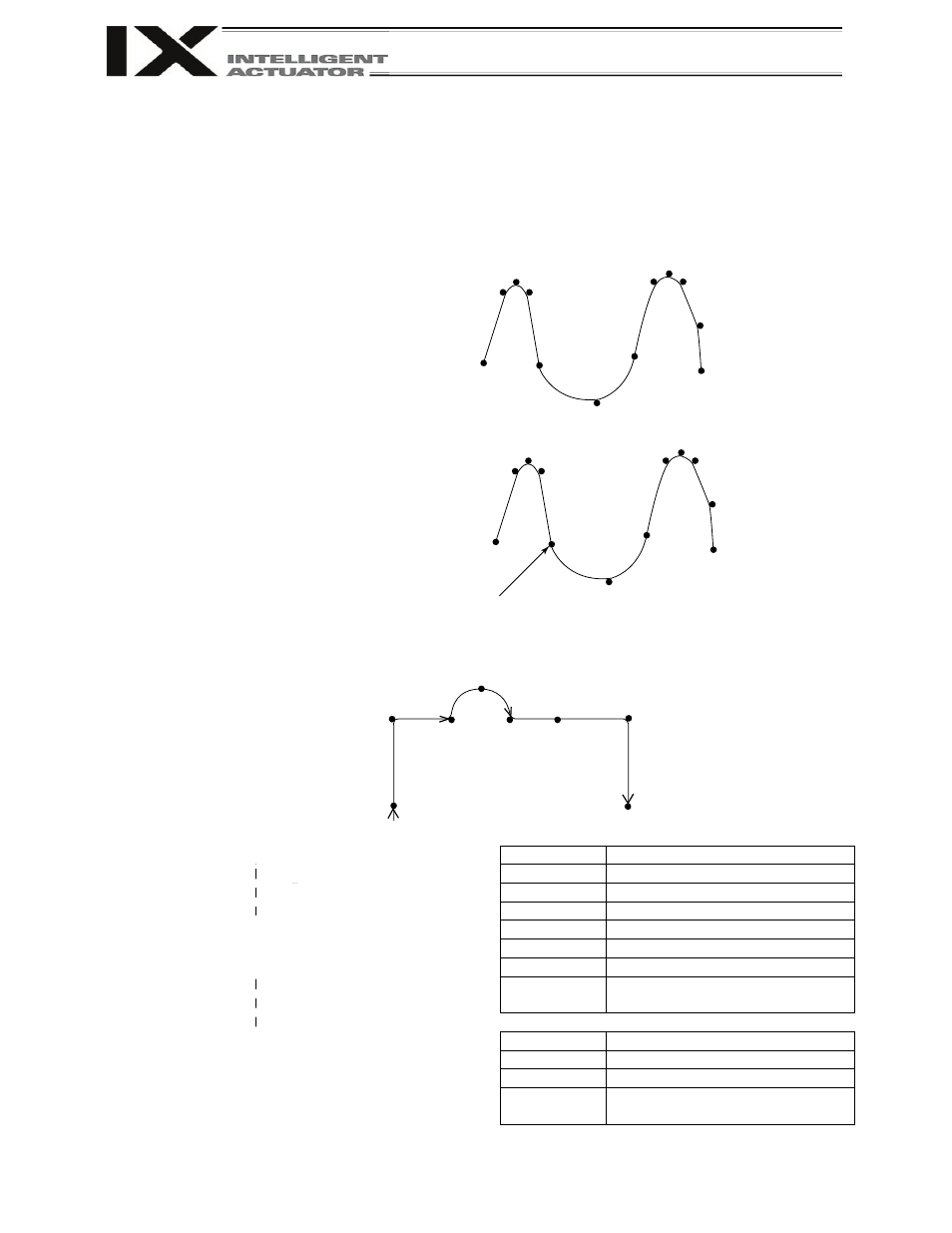
[3] The output field of each command will turn ON as the end position of that command approaches.
Only with the last command in a series of continuous movement commands, the output will turn
ON upon completion of operation (if there is no input condition).
[Example 1]
(POTP = 1)
POTP
1
Output field
Timing
308
Turn ON as P1 approaches.
309
Turn ON as P2 approaches.
310
Turn ON as P3 approaches.
PATH
1
3
308
311
Turn ON as P11 approaches.
ARC2
10
11
311
312
Turn ON as P21 approaches.
PATH
21
23
312
313
Turn ON as P22 approaches.
314
Turn ON when P23 operation is
complete.
[Example 2]
(POTP = 0)
Output field
Timing
PATH
1
3
308
308
Turn ON as P3 approaches.
ARC2
10
11
311
311
Turn ON as P11 approaches.
PATH
21
23
312
312
Turn ON when P23 operation is
complete.
Stops momentarily.
P1
(Position 1)
P3
P2
P4
P1
P5
P6
P7
P8
P9
P10
P12
P3
P2
P4
P1
P5
P6
P7
P8
P9
P10
P11
P12
P3
P2
P10
P23
P11
P21
P22
P11