IAI America XSEL-KX User Manual
Page 262
246
Part 4 Commands
(1) Positioning on the base coordinate system
Perform positioning after selecting load coordinate system No. 0.
Use a SLWK command to select a load coordinate system number in a SEL program. The selected
load coordinate system number will remain valid after the program ends, and even after
reconnection of power if a system-memory backup battery is installed.
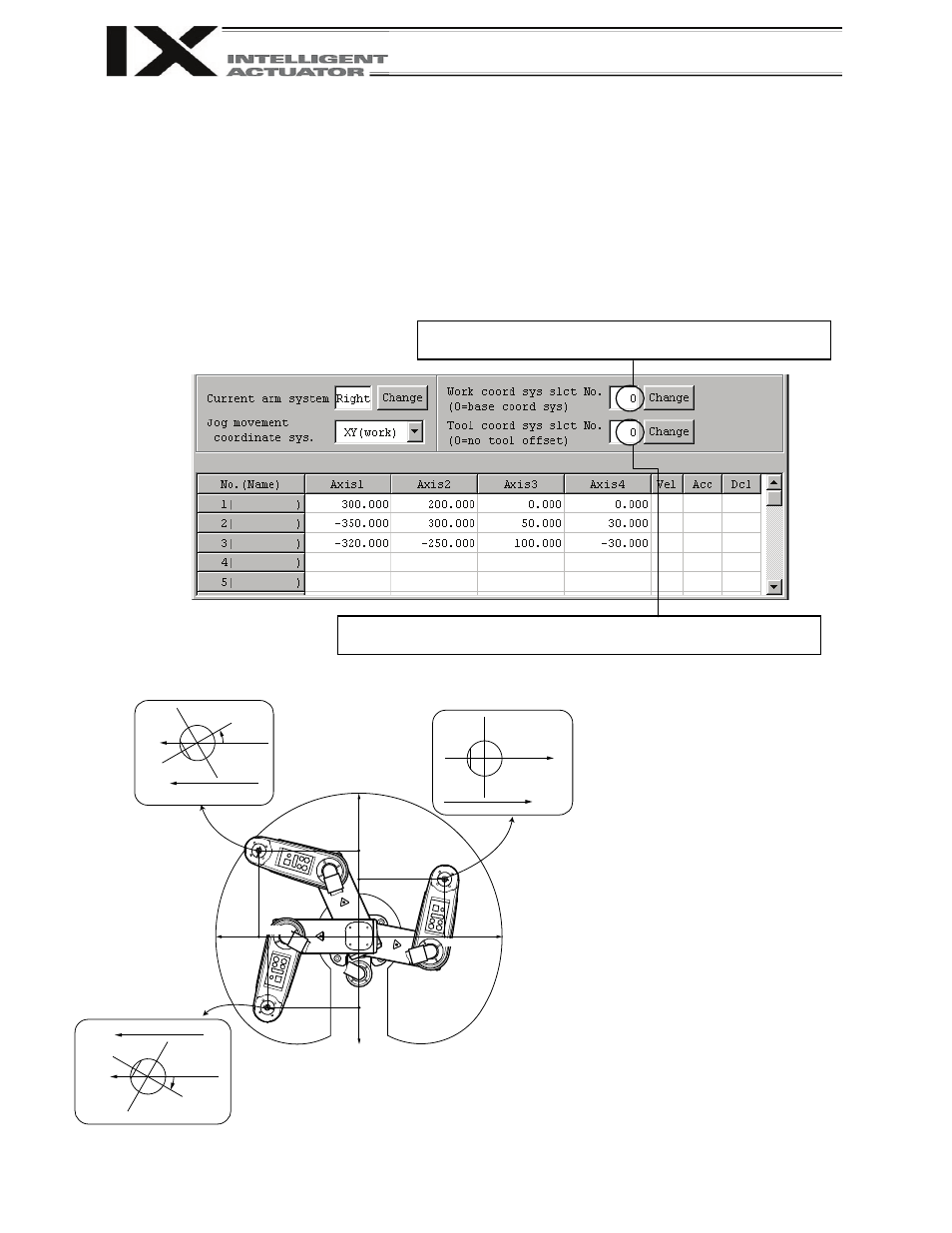
The figure below shows a part of the position data edit screen on the PC software for horizontal
articulated robot. Sample teaching data comprising the following contents have been entered:
X = 300, Y = 200, Z = 0, R = 0 as the position data of position No. 1
X = -350, Y = 300, Z = 50, R = 30 as the position data of position No. 2
X = -320, Y = -250, Z = 100, R = -30 as the position data of position No. 3
When poisoning to the above position data in PTP mode:
Program example
VELS 50
ACCS 50
SLWK 0
Select load coordinate
system No. 0.
SLTL
0
Select tool coordinate
system No. 0.
PTPR
Specify the right arm as the
PTP target arm system.
MOVP 1
MOVP 2
MOVP 3
EXIT
The selected load coordinate system number is displayed. Load
coordinate system No. 0 = Base coordinate system
The selected tool coordinate system number is displayed. Tool coordinate
system No. 0 = Positioning of the center of the tool-mounting surface
+Yb
–Yb
–Xb
+Xb
+Xb
–Xb
–Xb
30
°
–30
°
–350
–250
300
300
200