Toshiba Tosvert VF-AS1 User Manual
Page 256
K-18
E6581301
11
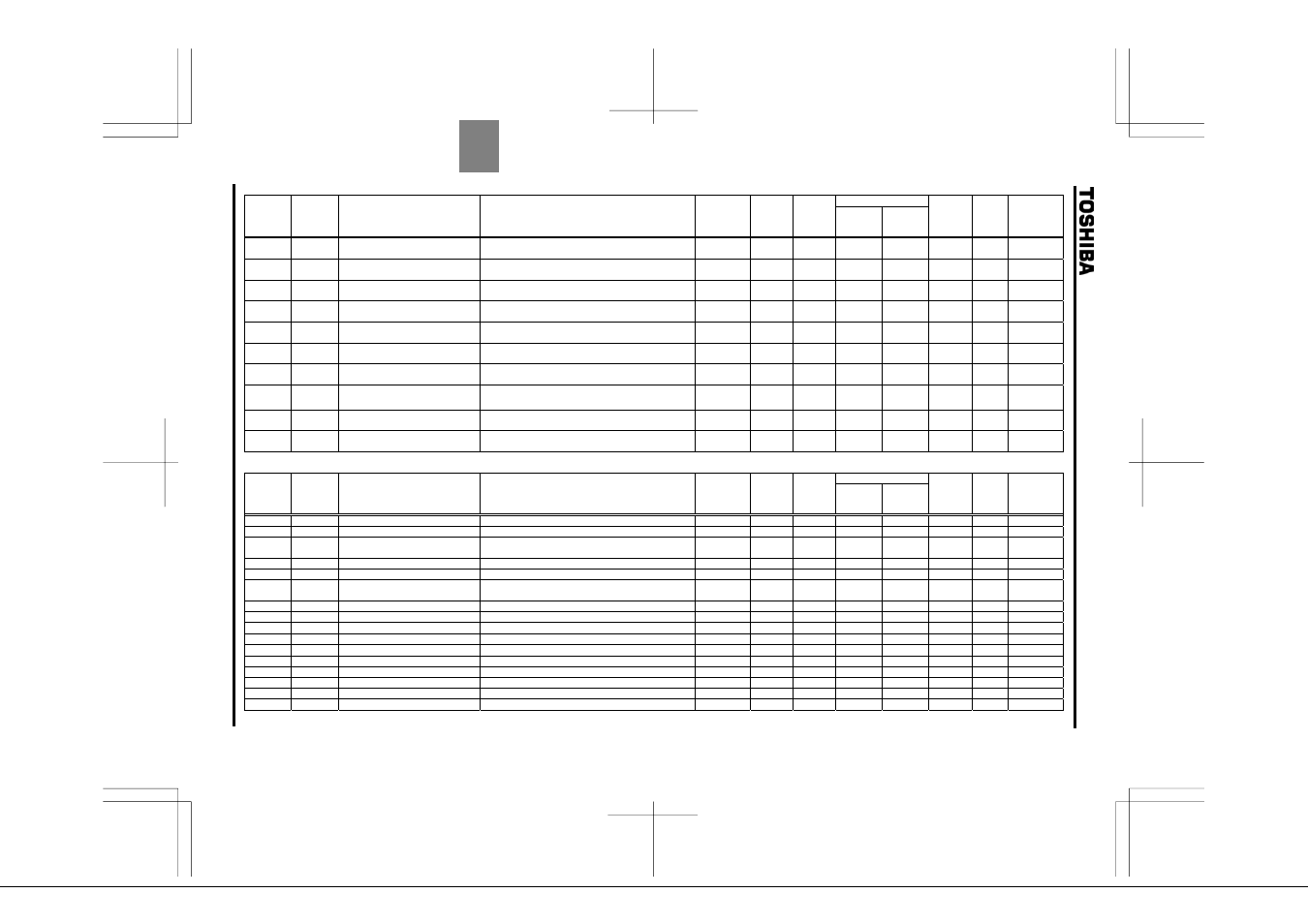
[20] Torque limit [2/2]
Vector control
Title
Communi
cation
No.
Function
Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
Default
setting
Write during
running
Speed
control
Torque
control
PM
control V/f Constant Reference
H
0443
Regenerative braking torque
limit 1 level
0.0~249.9%, 250.0:Disabled
0.1/0.01
250.0
Enabled
●/●
●/●
●
-
6. 25. 1
H
0444
Power running torque limit 2
level
0.0~249.9%, 250.0:Disabled
0.1/0.01
250.0
Enabled
●/●
●/●
●
-
6. 25. 1
H
0445
Regenerative braking torque
limit 2 level
0.0~249.9%, 250.0:Disabled
0.1/0.01
250.0
Enabled
●/●
●/●
●
-
6. 25. 1
H
0446
Power running torque limit 3
level
0.0~249.9%, 250.0:Disabled
0.1/0.01
250.0
Enabled
●/●
●/●
●
-
6. 25. 1
H
0447
Regenerative braking torque
limit 3 level
0.0~249.9%, 250.0:Disabled
0.1/0.01
250.0
Enabled
●/●
●/●
●
-
6. 25. 1
H
0448
Power running torque limit 4
level
0.0~249.9%, 250.0:Disabled
0.1/0.01
250.0
Enabled
●/●
●/●
●
-
6. 25. 1
H
0449
Regenerative braking torque
limit 4 level
0.0~249.9%, 250.0:Disabled
0.1/0.01
250.0
Enabled
●/●
●/●
●
-
6. 25. 1
H
0451
Acceleration/deceleration
operation after torque limit
0:In sync with acceleration/deceleration
1:In sync with min. time
1/1
0
Disabled
●/●
-
●
-
6. 25. 2
H
0452
Power running stall continuous
trip detection time
0.0~1.0 sec.
0.1/0.1
0.0
Enabled
●/●
-
●
●
6. 26. 1
H
0453
Regenerative braking stall
prevention mode selection
0:Stall during regenerative braking
1:Not stall during regenerative braking
1/1
0
Enabled
●/●
-
●
●
6. 26. 2
[21] Adjustment parameters [1/2]
Vector control
Title
Communi
cation
No.
Function
Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
Default
setting
Write during
running
Speed
control
Torque
control
PM
control V/f Constant Reference
H
0458
Current control proportional gain 0.0~100.0
0.1/0.1
0.0
Enabled
●/●
●/●
-
-
*1
H
0460
Speed loop proportional gain
1~9999
1/1
40
Enabled
●/●
-
-
-
*1
H
0461
Speed loop stabilization
coefficient
1~9999
1/1
100
Enabled
●/●
-
-
-
*1
H
0462
Moment of inertia of load 1
0~100
1/1
35
Enabled
●/●
-
●
-
*1
H
0463
Second speed loop proportional gain 1~9999
1/1
40
Enabled
●/●
-
-
-
*1
H
0464
Second speed loop stabilization
coefficient
1~9999
1/1
100
Enabled
●/●
-
●
-
*1
H
0465
Moment of inertia of load 2
0~100
1/1
35
Enabled
●/●
-
●
-
*1
H
0466
Speed PI switching frequency
0.0~HJ Hz
1/1
0.0
Enabled
●/●
-
-
-
*1
H
0470
VI/II input bias
0~255
1/1
*2
Enabled
●/●
●/●
●
●
6. 28
H
0471
VI/II input gain
0~255
1/1
*2
Enabled
●/●
●/●
●
●
6. 28
H
0472
RR/S4 input bias
0~255
1/1
*2
Enabled
●/●
●/●
●
●
6. 28
H
0473
RR/S4 input gain
0~255
1/1
*2
Enabled
●/●
●/●
●
●
6. 28
H
0474
RX input bias
0~255
1/1
*2
Enabled
●/●
●/●
●
●
6. 28
H
0475
RX input gain
0~255
1/1
*2
Enabled
●/●
●/●
●
●
6. 28
H
0476
Optional AI1 input bias
0~255
1/1
*2
Enabled
●/●
●/●
●
●
6. 28
H
0477
Optional AI1 input gain
0~255
1/1
*2
Enabled
●/●
●/●
●
●
6. 28
*1:
⇒ For details, refer to Instruction Manual (E6581333) specified in Section 6.41.
*2:
⇒
Settings vary from unit to unit. Even if V[R is set to , no change is made to these values.
Sensorless vector/vector with sensor (●:Effective, -:Ineffective)
Sensorless vector/vector with sensor (●:Effective, -:Ineffective)