Toshiba Tosvert VF-AS1 User Manual
Page 180
E6581301
F-68
6
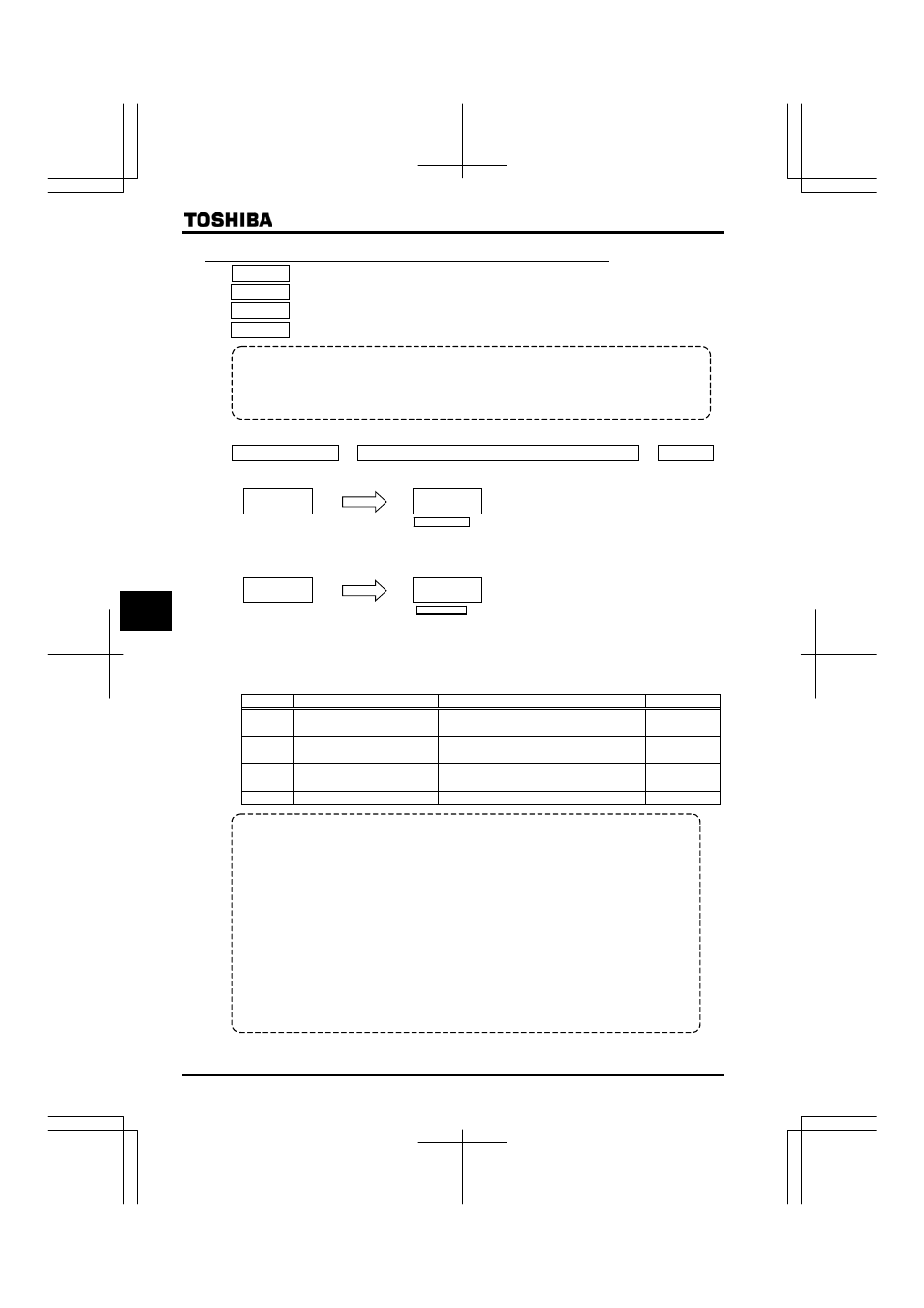
6.36.2 Displaying the rotational speed of the motor or the line speed
H
: Frequency free unit display magnification
H
: Frequency free unit conversion selection
H
: Free unit display gradient characteristic
H
: Free unit display bias
• Function
The frequency or any other item displayed on the monitor can be converted freely into the rotational speed
of the motor, the operating speed of the load, and so on. Using these parameters, the units of the amounts
of processing and feedback in PID control can also be changed.
The value obtained by multiplying the displayed frequency by the Hset value will be displayed as follows:
Value displayed = Monitor-displayed or parameter-set frequency
× H
1) Displaying the motor speed
To switch the display mode from 60Hz (default setting) to 1800 min
-1
(the rotating speed of the 4P motor)
H=
×.=
H
=.
Hz
2) Displaying the speed of the loading unit
To switch the display mode from 60Hz (default setting) to 6 m/min
-1
(the speed of the conveyer)
H
=.
H=.
×
.=.
Hz
Note:This parameter displays the inverter output frequency as the value obtained by multiplying it by a positive
number. Even when the actual speed of the motor changes according to the particular changes in load, the
output frequency will always be displayed.
Title
Function
Adjustment range
Default setting
H
Frequency free unit display
magnification
.:OFF
.~.
.
H
Frequency free unit conversion
selection
:All frequencies display free unit conversion
:PID frequencies free unit conversion
H
Free unit display gradient
characteristic
:Negative gradient (descending)
:Positive gradient (ascending)
H
Free unit display bias
.~HJ Hz
.
* The H converts the following parameter settings:
In case of H=
• Free unit
Frequency monitor display
Frequency-Related parameters
HJ
, WN, NN, CXH, CKH, UT~UT,
H
, H, H, H, H, H,
H
, H, H, H, H, H,
H
, H, H, H, H, H,
H
, H, H, H, H, H,
H
~H, H~H, H, H,
H
, H, H, H, H, H,
H
, H, H, H, H, H,
H
, H, H, H, H, H,
H
, H, H, H~H
In case of H=
• Free unit
PID control -Related parameters
H
, H, H, H