15 drooping control – Toshiba Tosvert VF-AS1 User Manual
Page 139
E6581301
F-27
6
6.14.4 Reverse run prohibition
H
: Reverse run prohibition selection
• Function
This function prevents the motor from running in the forward or reverse direction when it receives the wrong
operation signal.
[Parameter setting]
Title
Function
Adjustment range
Default setting
H
Reverse-run prohibition selection
:Permit all, :Prohibit reverse run
:Prohibit forward run
Warning!!
• If an operation command is entered to rotate the motor in the direction prohibited for the preset speed
operation with the mode or forced jog operation, this parameter will cancel the command regardless of
operation mode.
• If the motor constant is not set properly while vector control mode or automatic torque boost mode is
selected, the motor may turn in the reverse direction. The number of revolutions that correspond to the slip
frequency, in these modes, therefore, the stop frequency (H) should be set at the same level as the
slip frequency. In sensor vector control mode (RV=, ), depending on the setting of WX, the motor
restarted may rotate in the direction opposite to the prohibited direction regardless of the setting of this
parameter.
6.15
Drooping control
H
: Drooping gain
H
: Speed at drooping gain 0%
H
: Speed at drooping gain H
H
: Drooping insensitive torque
H
: Drooping output filter
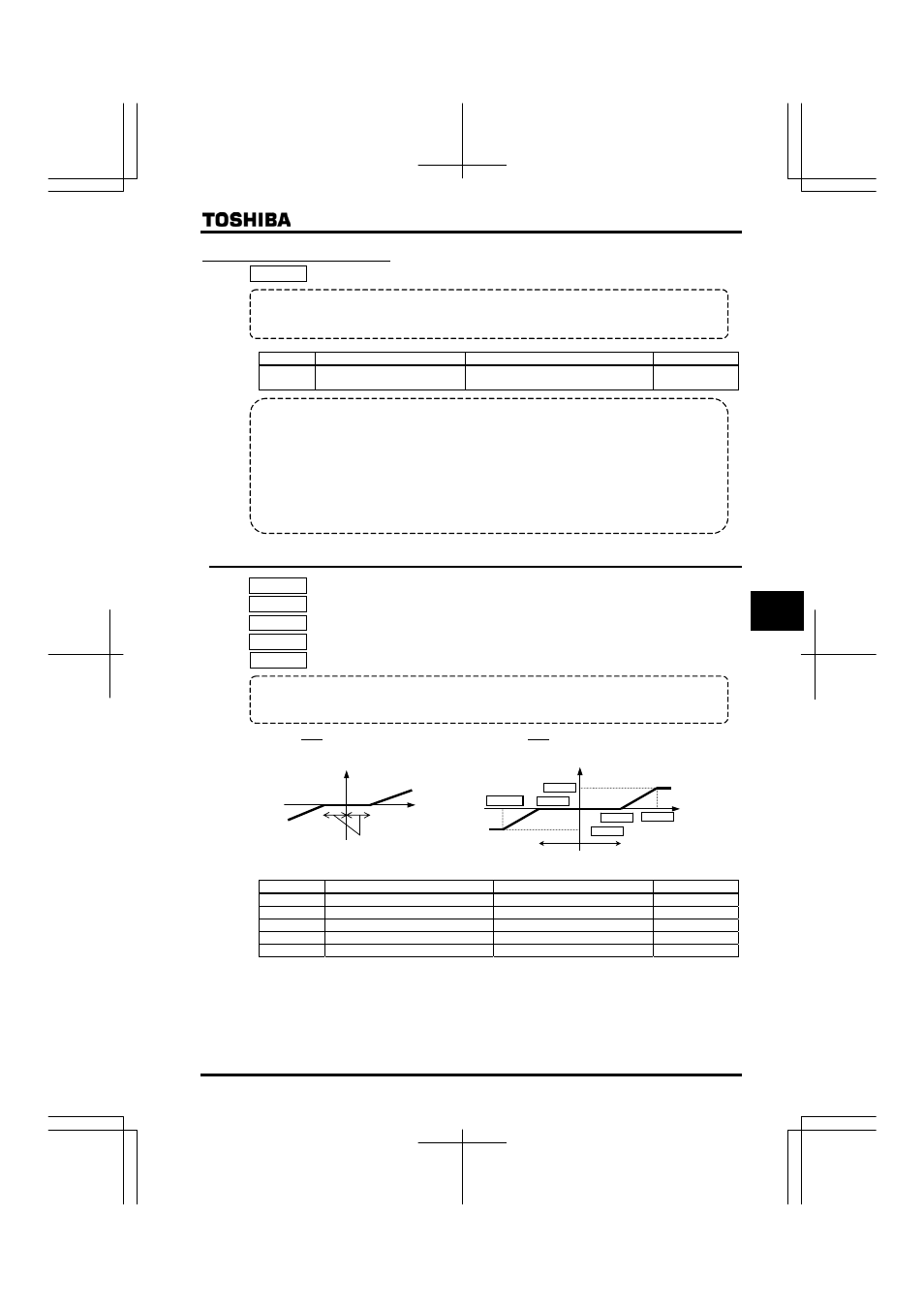
• Function
When multiple inverters and motors are used to operate a system, the load can distribute to them using this
function. These parameters allow you to adjust the frequency range, and also insensitive torque and gain.
Frequency
D
roo
pin
g g
ain
Drooping insensitive torque
Internal torque
command
D
ro
opi
ng gai
n
H
–
H
H
–
H
H
– H
Drooping insensitive frequency
Gain2
Gain1
[Parameter setting]
Title
Function
Adjustment range
Default setting
H
Drooping gain
~%
H
Speed at drooping gain 0%
~Hz
H
Speed at drooping gain H
~Hz
H
Drooping insensitive torque
~%
H
Drooping output filter
~ rad/s
• Drooping control can be performed only when RV is set to , , or .
• When torque over the insensitive torque is applied, the frequency is decreased (during power running) or 6
increased (during regenerative braking).
• The drooping function is operative at frequencies over the frequency set with H.
• In the frequency range between the frequencies set with H and H, the degree of drooping changes
according to the magnitude of frequency.
• The error in drooping insensitive torque increases in the frequency range above the base frequency, and it is
therefore recommended that these functions be used at frequencies below the base frequency.
• During drooping control, the output frequency is not restricted by the maximum frequency (HJ).