21 stop position control function – Toshiba Tosvert VF-AS1 User Manual
Page 146
E6581301
F-34
6
6.21
Stop position control function
RV
: V/f control mode selection
H
:
PID control switching
H
: PID control feedback control
signal selection
H
: Proportional (P) gain
H
: Number of PG input pulses
H
: Selection of number of PG
input phases
H
: Simple positioning
completion range
• Function
This function, which is aimed at a retaining the load at standstill at its normal stop position, is used along
with the speed sensor vector control function to prevent the position of an elevator at standstill from
shifting.
Switching to position control takes place when the load is at a standstill.
The settings of these parameters take effect only in sensor speed control mode.
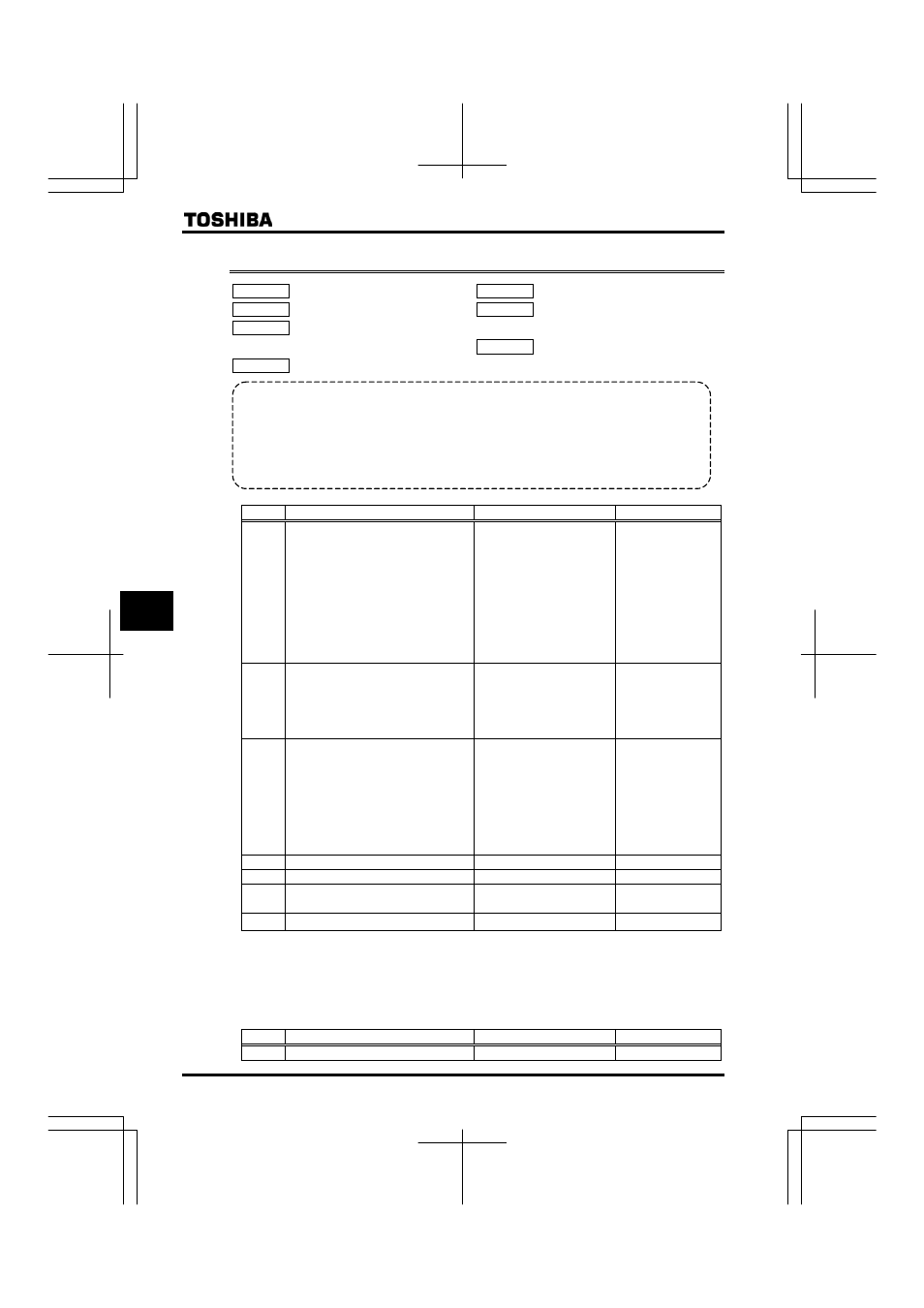
[Parameter setting]
Title
Function
Adjustment range
Example of setting
RV
V/f control mode selection
:Constant torque
characteristics
:Voltage decrease curve
:Automatic torque boost
:Sensorless vector control 1
(speed)
:Sensorless vector control 2
(speed/torque)
:V/f 5-point setting
:PM control
:PG feedback vector control 1
(speed)
:PG feedback vector control 2
(speed/torque)
H
PID control switching
:No PID control
:Process type PID control
(temp./pressure, etc.)
operation
:Speed type PID control
(potentiometer, etc.) operation
:Stop retaining P control
H
PID control feedback control signal
selection
:Deviation input (no feedback
input)
:VI/II (voltage/current input)
:RR/S4 (potentiometer/voltage
input)
:RX (voltage input)
:Optional AI1 (differential
current input)
:Optional AI2 (voltage/current
input)
: PG feedback option
H
Proportional (P) gain
~
H
Number of PG input pulses
~ pulses/revolution
H
Number of PG input phases
:Single-phase input
:Two-phase input
H
Simple positioning completion range
~
In speed control mode or specified with the V/f control mode section parameter (RV), simple positioning
control is performed upon receipt of a simple positioning signal, with the position at that time used as the reference
point (positional deviation: 0).
Note:
This function will not be performed if H (starting frequency), H (operation starting frequency) and
H
(stop frequency) are not set at 0Hz, because a 0-Hz command is not issued in that case.
Ex.) When using the RR/S4 terminal as the simple positioning signal input terminal
Title
Function
Adjustment range
Default setting
H
Input terminal function selection 8 (RR/S4)
~