8 dc braking – Toshiba Tosvert VF-AS1 User Manual
Page 126
E6581301
F-14
6
0
H + H
H
H – H
HJ
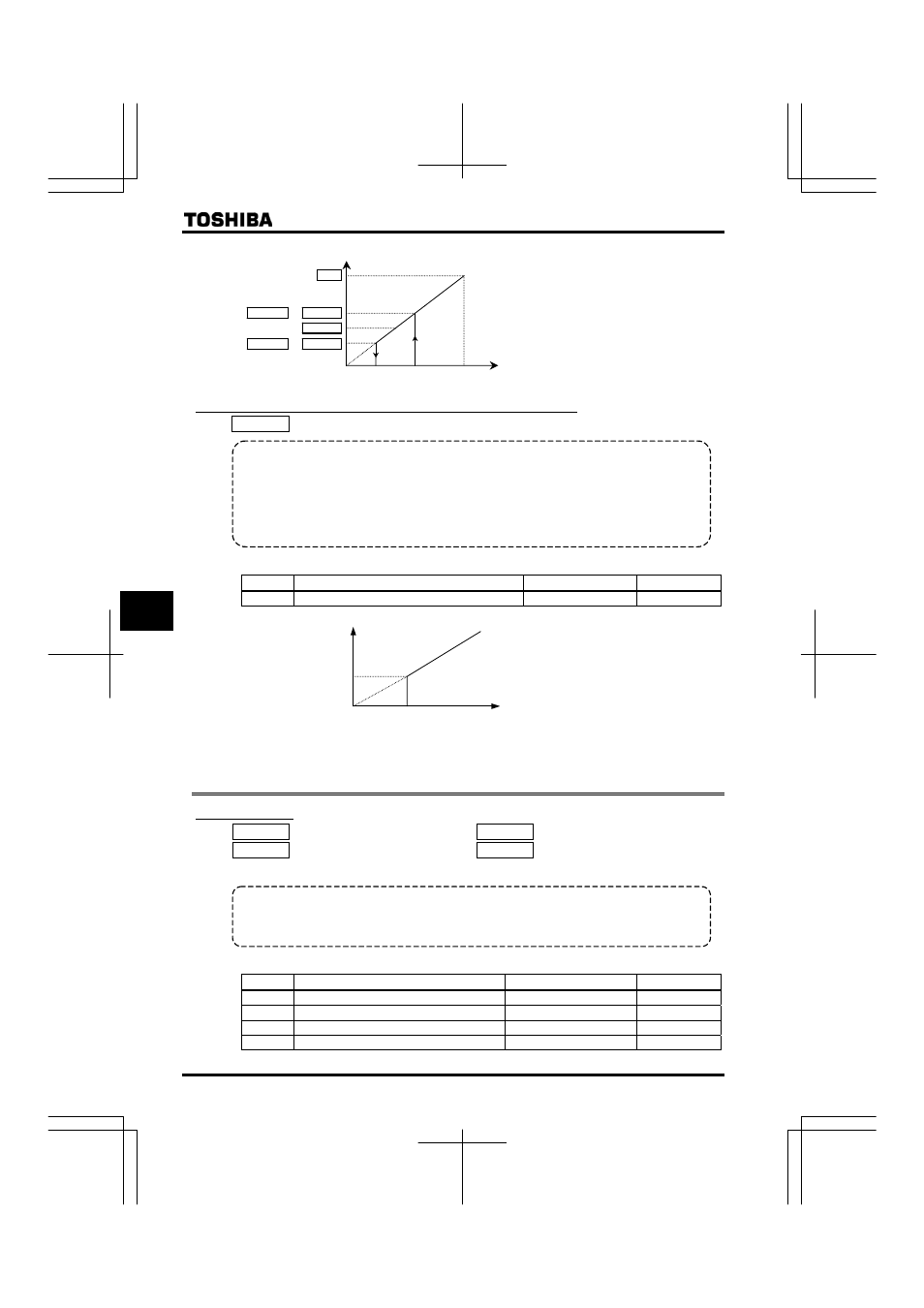
The inverter begins accelerating after
the frequency command value has
reached point B.
Deceleration stop begins when the
frequency command value decreases
below point A.
Output frequency [Hz]
A
B
100%
Operation frequency command value
6.7.3. Frequency setting signal 0Hz dead zone handling function
H
: Frequency command dead band
• Function
If the frequency is set to 0Hz by means of an analog signal so that the motor shaft can be locked by sensor
vector control (RV=, ) the frequency may not always be 0Hz because of drift or offset.
In such a case, this parameter allows you to correctly set the operation frequency command to 0Hz. If the
operation frequency command is below the frequency setting signal 0Hz insensitive frequency set with
H
, parameter H will adjust the operation frequency command to 0Hz.
[Parameter setting]
Title
Function
Adjustment range
Default setting
H
Frequency command dead band
~Hz
Operation frequency
command value
Output after handling
of the dead zone
H
0Hz
Operation frequency
command value
Note 1: This function is invalid to preset
the speed operation frequency
command.
Note 2: It is effective as frequency
instruction is to the frequency
reference chosen by HOQF,
H
, communication,etc.
Note 3: The addition and multiplication of
the override function is carried out
to the frequency in which this
function operated.
6.8
DC braking
6.8.1 DC braking
H
: DC braking starting frequency
H
: DC braking current
H
: DC braking time
H
: Forward/reverse DC braking
priority control
• Function
A large braking torque can be obtained by applying a direct current to the motor. These parameters set the
direct current applied to the motor, the application time and the start frequency.
[Parameter setting]
Title
Function
Adjustment range
Default setting
H
DC braking start frequency
~Hz
H
DC braking current
~%
H
DC braking time
~ sec.
H
Forward/reverse DC braking priority control
:OFF, :ON