Explicit messaging with controllogix, Setting up the msg instruction – Rockwell Automation 284 ArmorStart User Manual User Manual
Page 260
9-8
Explicit Messaging on DeviceNet™
Table 9.9
Example ControlLogix Input Addressing (Produced Assembly)
)
Table 9.10 Example ControlLogix Output Address (Consumed Assembly)
)
Explicit Messaging with
ControlLogix
The ControlLogix platform requires significantly less structure to
initiate an explicit message. The explicit message Request and
Response is configured within the MSG function. The MSG function
can be found in the Input/Output tab of RSLogix 5000. Notice that in
the ControlLogix program example, rung 6 is the only required logic
to complete the explicit message request.
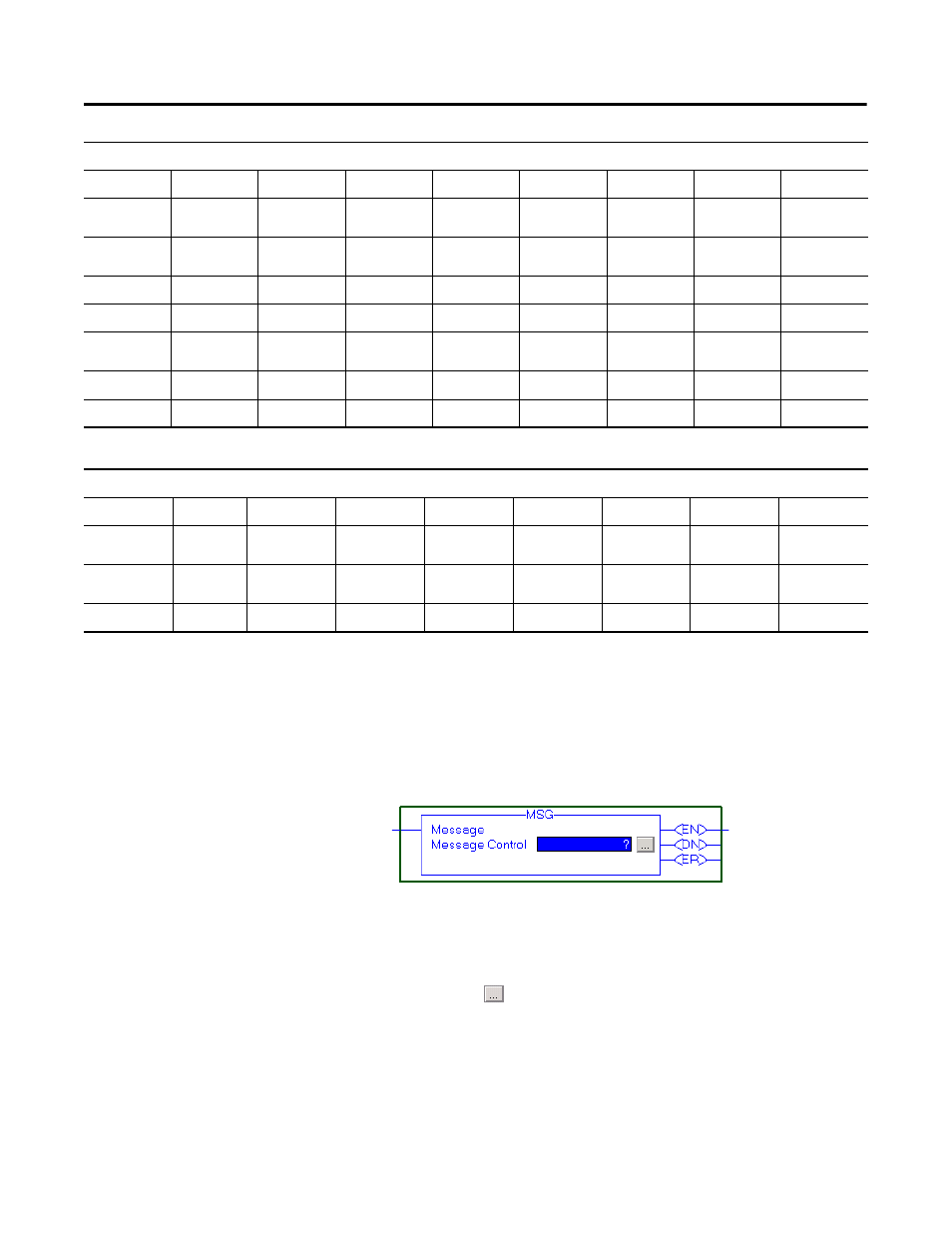
Setting Up the MSG Instruction
A tag name must be given to the MSG function before the rest of the
information can be defined. In this example a tag was created with the
name explicit_mess. After the instruction has been named, click on
the gray box
to define the rest of the instruction.
The following example shows the exact data format to perform a Get
Attribute Single request. This message will specifically access
parameter 104, Average Current. See Table 9.6 on page 9-4 for
additional configurations.
Instance 161 Default Produced Standard Distributed Motor Controller
Byte 0
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Address
Local:1:I.
Data[1].7
Local:1:I.
Data[1].6
Local:1:I.
Data[1].5
Local:1:I.
Data[1].4
Local:1:I.
Data[1].3
Local:1:I.
Data[1].2
Local:1:I.
Data[1].1
Local:1:I.
Data[1].0
Tag Name
—
—
—
—
—
—
Status_
warning
Status_
tripped
Data
reserved
reserved
reserved
Ready
Running Rev
Running Fwd
Warning
Tripped
Byte 1
Bit 15
Bit 14
Bit 13
Bit 12
Bit 11
Bit 10
Bit 9
Bit 8
Address
Local:1:I.
Data[1].15
Local:1:I.
Data[1].14
Local:1:I.
Data[1].13
Local:1:I.
Data[1].12
Local:1:I.
Data[1].11
Local:1:I.
Data[1].10
Local:1:I.
Data[1].9
Local:1:I.
Data[1].8
Tag Name
—
—
Status_140M
—
—
—
—
—
Data
reserved
reserved
140M On
HOA
User In 3
User In 2
User In 1
User In 0
Instance 160 Default Consumed Standard Distributed Motor Controller
Byte 0
Bit 7
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Address
Local:1:O.
Data[1].7
Local:1:O.
Data[1].6
Local:1:O.
Data[1].5
Local:1:O.
Data[1].4
Local:1:O.
Data[1].3
Local:1:O.
Data[1].2
Local:1:O.
Data[1].1
Local:1:O.
Data[1].0
Tag Name
Control_Out
B
Control_Out
A
—
—
—
Control_fault
Reset
—
—
Data
User Out B
User Out A
reserved
reserved
reserved
Fault Reset
Run Rev
Run Fwd