Rockwell Automation 284 ArmorStart User Manual User Manual
Page 226
6-52
Bulletin 284 Programmable Parameters for Sensorless Vector Controllers
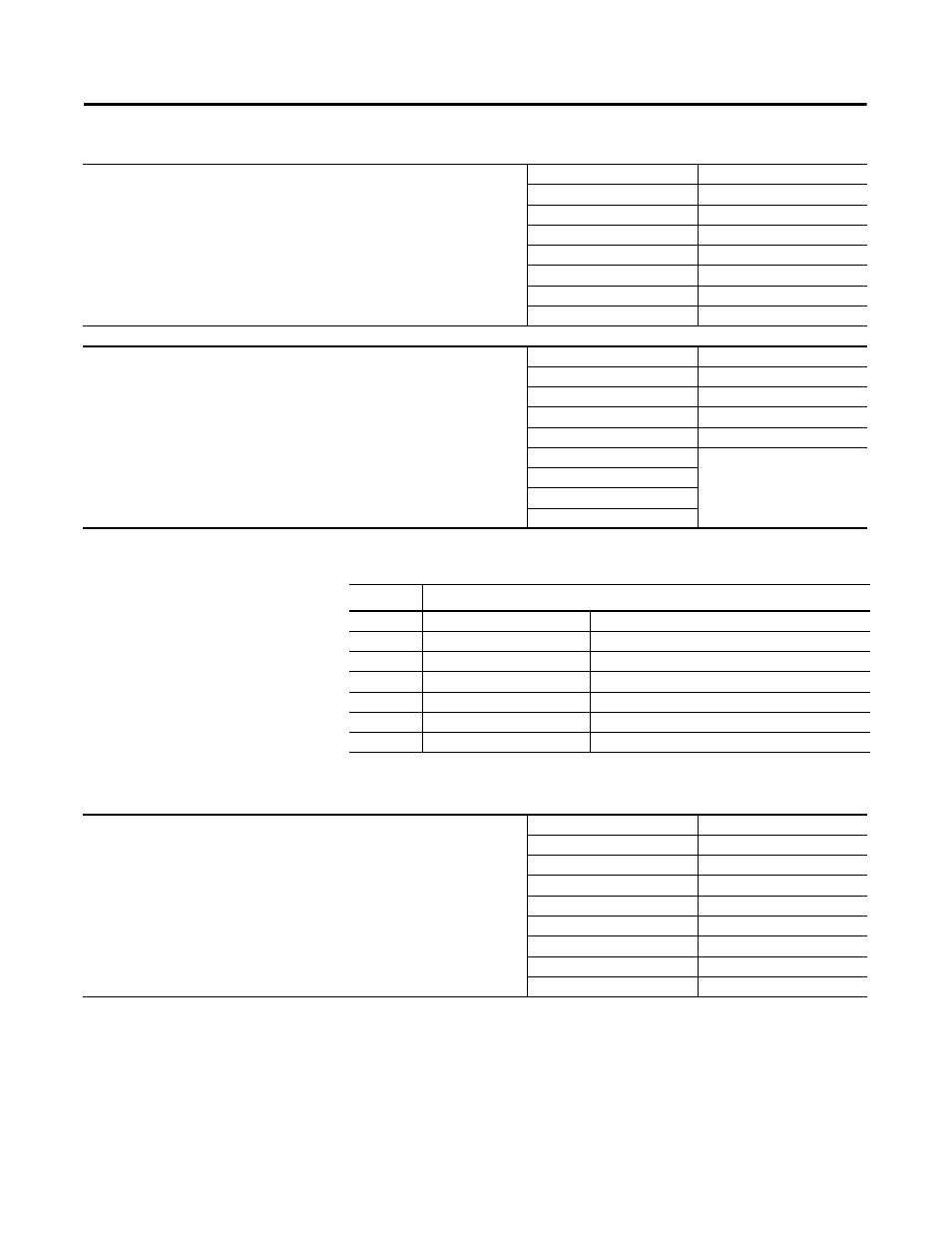
Table 6.7
Stall Fault Time
Sets for the fault time that the drive will remain in stall mode before a fault is issued.
0 = 60 sec (Default)
1 = 120 sec
2 = 240 sec
3 = 360 sec
4 = 480 sec
5 = Flt Disabled
Parameter Number
221
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
—
Minimum Value
0
Maximum Value
5
Default Value
0
Analog In Loss
Selects drive action when an input signal loss is detected. Signal loss is defined as
an analog signal less than 1V. The signal loss event ends and normal operation
resumes when the input signal level is greater than or equal to 1.5V. If using a
0…10V analog input, set parameter 210 (Anlg In 0…10V Lo) to a minimum of 20%
(i.e., 2 volts).
Parameter Number
222
Related Parameters
210, 211, 232
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
See Table 6.7 for details
Minimum Value
Maximum Value
Default Value
Options
Description
0
Disabled (Default)
1
Fault (F29)
F29 Analog Input Loss
2
Stop
Uses P037 (Stop Mode)
3
Zero Ref
Drive runs at zero speed reference
4
Min Freq Ref
Drive runs at minimum frequency
5
Max Freq Ref
Drive runs at maximum frequency
6
Int Freq Ref
Drive runs at internal frequency
10V Bipolar Enbl
Enables/disables bipolar control. In bipolar mode, direction is commanded by the
sign of the reference.
Options
0 = Unipolar In (Default) 0…10V only
1 = Bipolar In +/- 10V
Parameter Number
223
Related Parameters
138, 211
Access Rule
GET/SET
Data Type
UINT
Group
Advanced Program Group
Units
—
Minimum Value
0
Maximum Value
1
Default Value
0