0x1615 - rpdo-->axis b: freely configurable (user), 0x1616 - rpdo-->axis b: torque limits, 0x1617 - rpdo --> axis b: speed limits – Lenze i700 User Manual
Page 317: 0x1616, 0x1a00, 0x1615, 0x1617, 11 appendix
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
317
11
Appendix
11.3
Communication objects
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
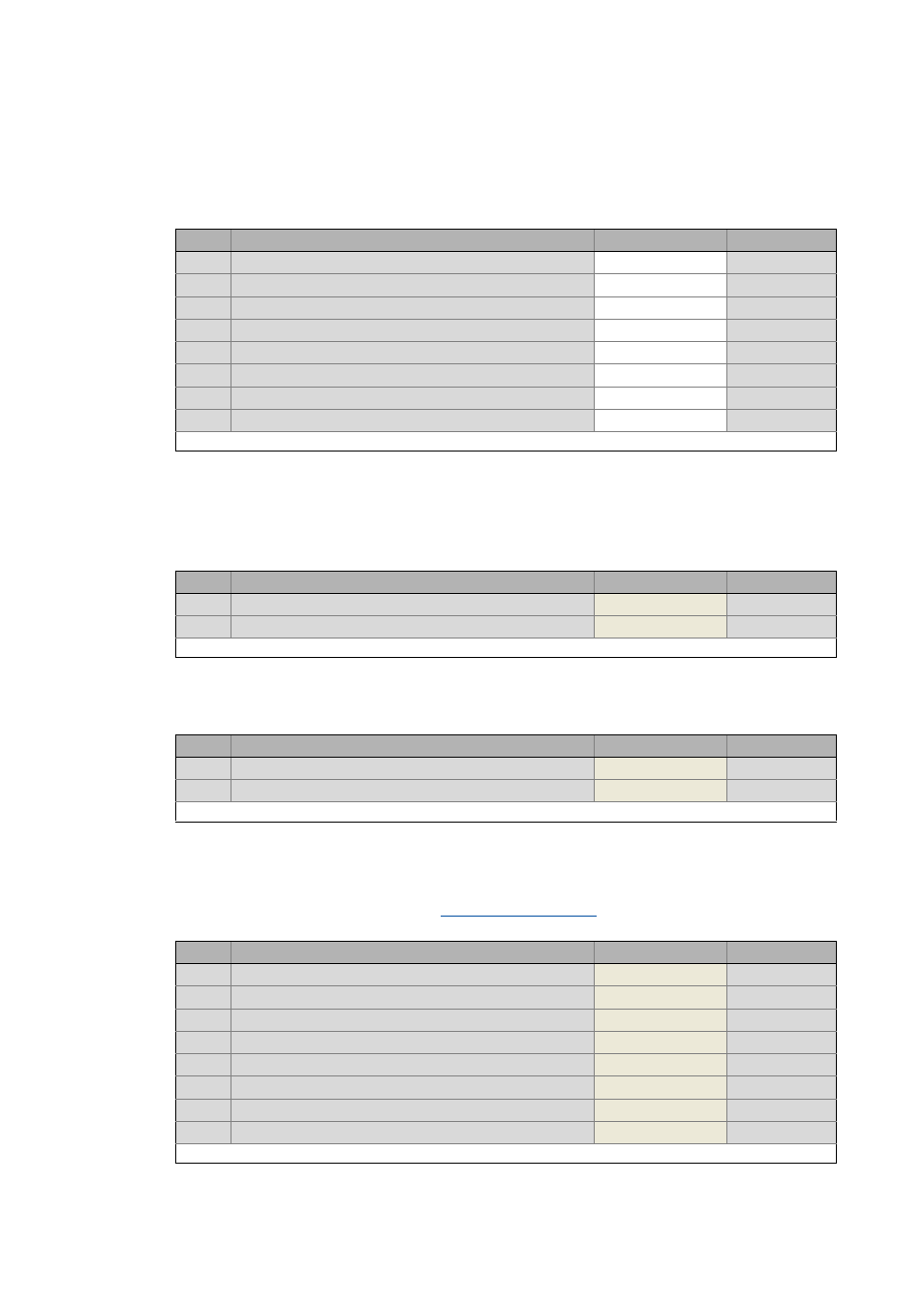
0x1615 - RPDO-->Axis B: Freely configurable (user)
0x1616 - RPDO-->Axis B: Torque limits
0x1617 - RPDO --> Axis B: Speed limits
0x1A00 - Axis A-->TPDO: Cyclic sync position mode (csp)
PDO mapping object freely configurable by the user for process data from the controller to the servo inverter i700
Sub.
Name
Lenze setting
Data type
1 (user) RPDO-->B: xxxx freely configurable object 1
0x00000000
UNSIGNED_32
2 (user) RPDO-->B: xxxx freely configurable object 2
0x00000000
UNSIGNED_32
3 (user) RPDO-->B: xxxx freely configurable object 3
0x00000000
UNSIGNED_32
4 (user) RPDO-->B: xxxx freely configurable object 4
0x00000000
UNSIGNED_32
5 (user) RPDO-->B: xxxx freely configurable object 5
0x00000000
UNSIGNED_32
6 (user) RPDO-->B: xxxx freely configurable object 6
0x00000000
UNSIGNED_32
7 (user) RPDO-->B: xxxx freely configurable object 7
0x00000000
UNSIGNED_32
8 (user) RPDO-->B: xxxx freely configurable object 8
0x00000000
UNSIGNED_32
Write access CINH OSC P RX TX
Fixed, preconfigured PDO mapping object for torque limits
Sub.
Name
Lenze setting
Data type
1 (torque) RPDO-->B: 0x68E0 (Positive torque limit value)
0x68E00010
UNSIGNED_32
2 (torque) RPDO-->B: 0x68E1 (Negative torque limit value)
0x68E10010
UNSIGNED_32
Write access CINH OSC P RX TX
Sub.
Name
Lenze setting
Data type
1 (Speed) RPDO-->B: 0x3146/1 (upper speed limit)
826671392
UNSIGNED_32
2 (Speed) RPDO-->B: 0x3146/2 (Lower speed limit)
826671648
UNSIGNED_32
Write access CINH OSC P RX TX
Fixed, preconfigured PDO mapping object for
Sub.
Name
Lenze setting
Data type
1 (csp) A-->TPDO: 0x6041 (Statusword)
0x60410010
UNSIGNED_32
2 (csp) A-->TPDO: 0x2831 (Lenze status word)
0x28310010
UNSIGNED_32
3 (csp) A-->TPDO: 0x6061 (Modes of operation display)
0x60610008
UNSIGNED_32
4 (csp) A-->TPDO: 0x603F (Error code)
0x603F0010
UNSIGNED_32
5 (csp) A-->TPDO: 0x606C (Velocity actual value)
0x606C0020
UNSIGNED_32
6 (csp) A-->TPDO: 0x6077 (Torque actual value)
0x60770010
UNSIGNED_32
7 (csp) A-->TPDO: 0x6064 (Position actual value)
0x60640020
UNSIGNED_32
8 (csp) A-->TPDO: 0x60F4 (Following error actual value)
0x60F40020
UNSIGNED_32
Write access CINH OSC P RX TX