11 appendix, 1 table of attributes – Lenze i700 User Manual
Page 301
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
301
11
Appendix
11.1
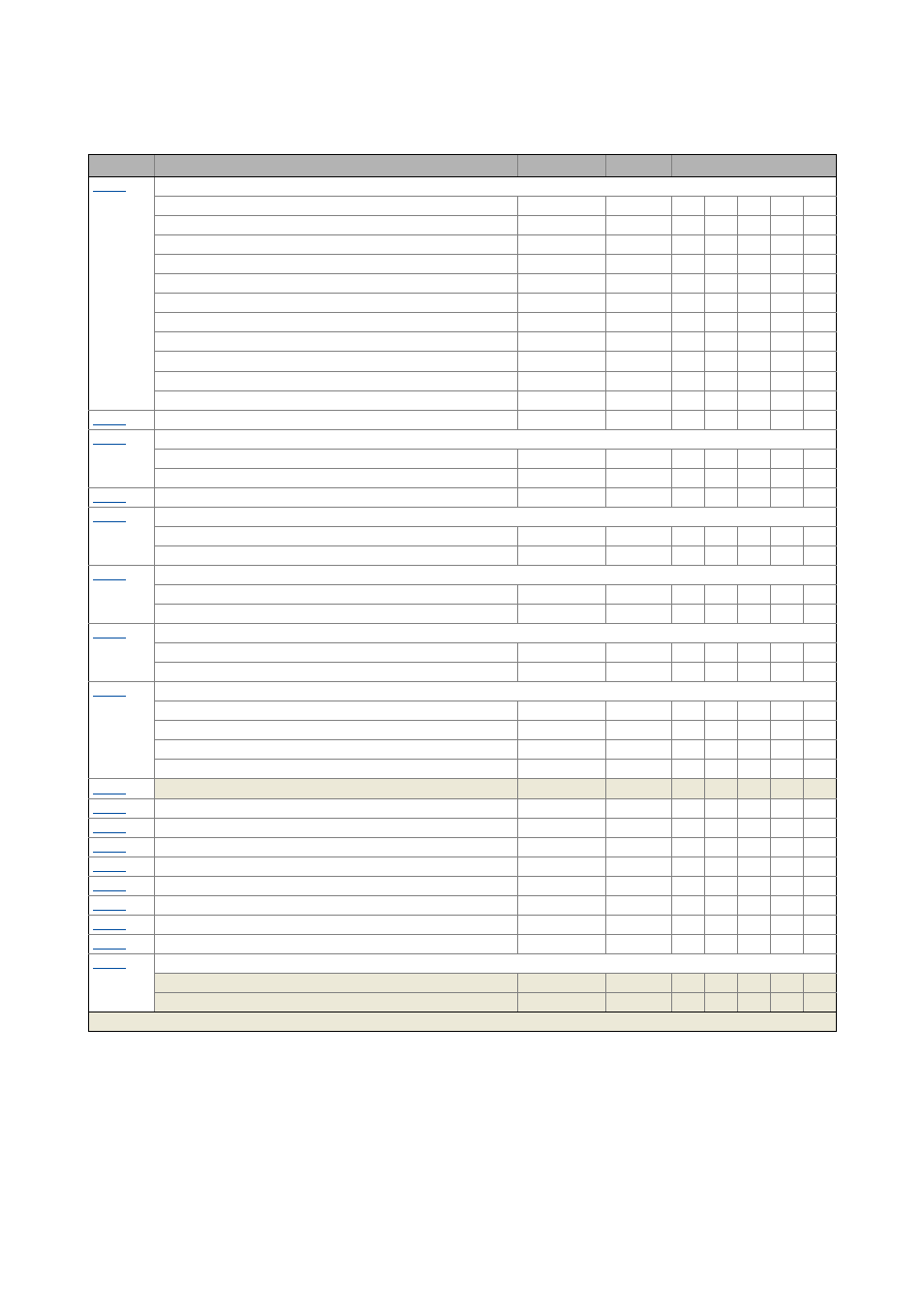
Table of attributes
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
VFC: User-definable V/f characteristic - voltage grid points (y)
1: V/f: y1 = U01 (x = f01)
UNSIGNED_32
1/100
P
2: V/f: y2 = U02 (x = f02)
UNSIGNED_32
1/100
P
3: V/f: y3 = U03 (x = f03)
UNSIGNED_32
1/100
P
4: V/f: y4 = U04 (x = f04)
UNSIGNED_32
1/100
P
5: V/f: y5 = U05 (x = f05)
UNSIGNED_32
1/100
P
6: V/f: y6 = U06 (x = f06)
UNSIGNED_32
1/100
P
7: V/f: y7 = U07 (x = f07)
UNSIGNED_32
1/100
P
8: V/f: y8 = U08 (x = f08)
UNSIGNED_32
1/100
P
9: V/f: y9 = U09 (x = f09)
UNSIGNED_32
1/100
P
10: V/f: y10 = U10 (x = f10)
UNSIGNED_32
1/100
P
11: V/f: y11 = U11 (x = f11)
UNSIGNED_32
1/100
P
VFC: Voltage vector control - current setpoint
UNSIGNED_32
1/100
P
VFC: Voltage vector control parameter
1: VFC: Voltage vector controller - gain
UNSIGNED_32
1/100
P
2: VFC: Voltage vector controller - reset time
UNSIGNED_32
1/100
P
VFC: Voltage boost
UNSIGNED_16
1/10
P
VFC: Load adjustment - parameter
1: VFC: Load adjustment - direction of rotation
UNSIGNED_8
-
P
CINH
2: VFC: Load adjustment - value
UNSIGNED_32
1/100
P
VFC: Imax controller - parameter
1: VFC: Imax controller - gain
UNSIGNED_32
1/1000
P
2: VFC: Imax controller - reset time
UNSIGNED_32
1/10
P
VFC: Slip compensation - parameter
1: VFC: Slip compensation - influence
INTEGER_16
1/100
P
2: VFC: Slip compensation - filter time
UNSIGNED_16
-
P
VFC: Oscillation damping - parameter
1: VFC: Oscillation damping - gain
INTEGER_16
-
P
2: VFC: Oscillation damping - filter time
UNSIGNED_16
-
P
3: VFC: Oscillation damping - limitation
UNSIGNED_16
1/10
P
4: VFC: Oscillation damping - final ramp frequency
UNSIGNED_8
-
P
VFC: Frequency setpoint
INTEGER_16
1/10
OSC
Tx
VFC: Override point of field weakening
INTEGER_16
1/10
P
DC-injection braking: Current
UNSIGNED_16
1/100
P
Flying restart: Activate
UNSIGNED_8
-
P
Flying restart: Current
UNSIGNED_16
-
P
Flying restart: Start frequency
INTEGER_16
1/10
P
Flying restart: Integration time
UNSIGNED_16
-
P
Flying restart: Min. deviation
UNSIGNED_16
1/100
P
Flying restart: Delay time
UNSIGNED_16
-
P
Flying restart: Result
1: Flying restart: Determined speed [rpm]
INTEGER_16
-
OSC
Tx
2: Flying restart: Determined speed [n unit]
INTEGER_32
480000/2
31
OSC
Tx
Index
Name
Data type
Scaling
Attributes
Greyed out = read only