11 appendix, 1 table of attributes 298 – Lenze i700 User Manual
Page 298
11
Appendix
11.1
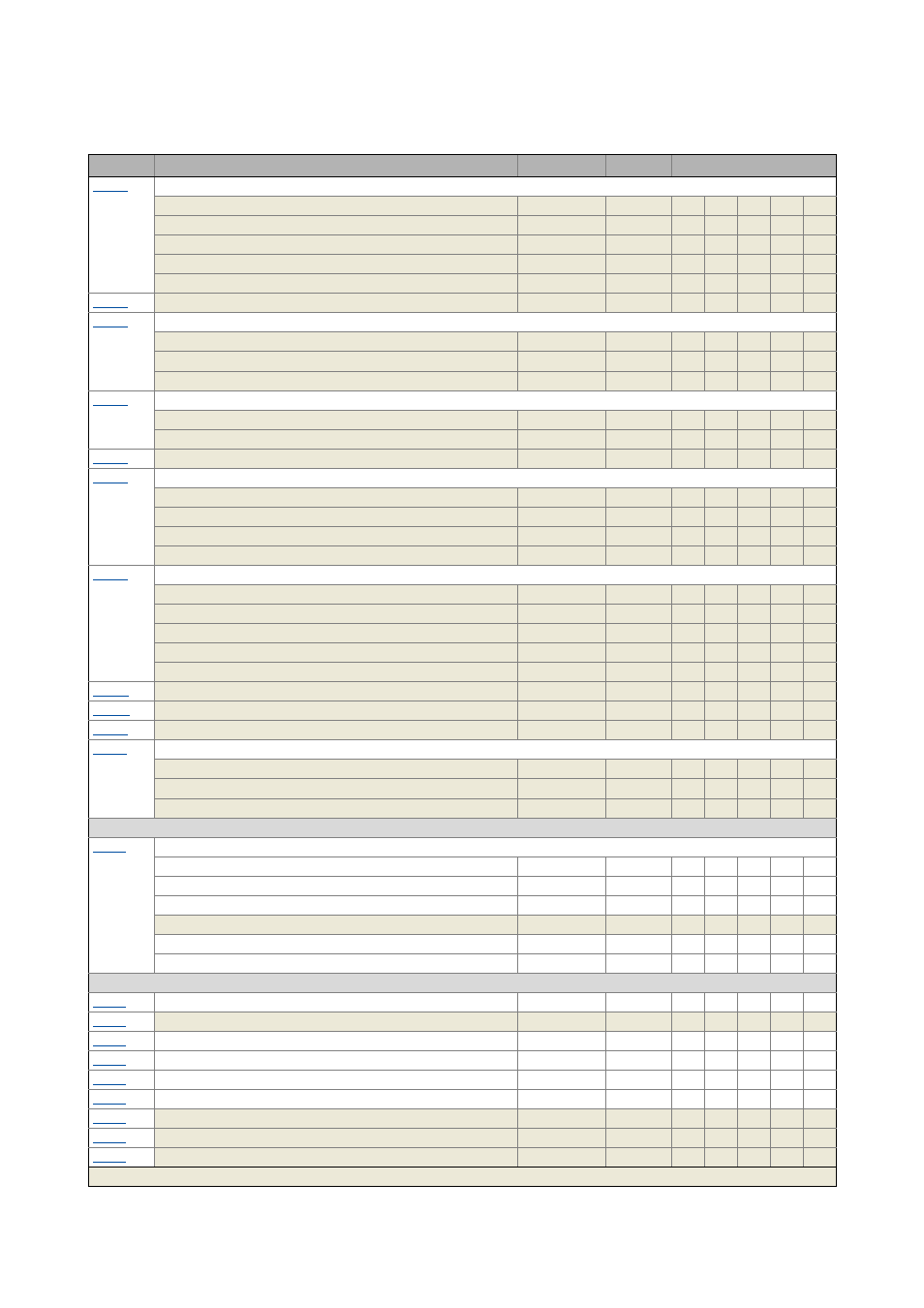
Table of attributes
298
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Motor: Currents
1: D current (id): Actual D current
INTEGER_16
1/100
OSC
Tx
2: Q current (iq): Actual Q current
INTEGER_16
1/100
OSC
Tx
3: D current (id): Setpoint D current
INTEGER_16
1/100
OSC
Tx
4: Q current (iq): Setpoint Q current
INTEGER_16
1/100
OSC
Tx
5: Motor current Ieff
INTEGER_16
1/100
OSC
Tx
Position: Target position interpolated
INTEGER_32
-
OSC
Tx
Target speeds
1: Speed: Setpoint speed
INTEGER_32
-
OSC
Tx
2: Speed: Setpoint speed 2
INTEGER_32
-
OSC
Tx
3: Speed: Limited setpoint speed
INTEGER_32
-
OSC
Tx
Speed controller: Output signal
1: Speed controller: Output signal 1
INTEGER_16
1/10
OSC
Tx
2: Speed controller: Output signal 2
INTEGER_16
1/10
OSC
Tx
Target torque
INTEGER_32
1/100
OSC
Tx
Torque: Filter cascade
1: Torque: Filter cascade - starting value
INTEGER_16
1/10
OSC
Tx
2: Torque: Notch filter 1 - input value
INTEGER_16
1/10
OSC
Tx
3: Torque: Notch filter 2 - input value
INTEGER_16
1/10
OSC
Tx
4: Torque: Filtered setpoint torque
INTEGER_16
1/10
OSC
Tx
Voltage values
1: Actual motor voltage limit: Actual voltage
INTEGER_16
1/10
OSC
Tx
2: D-current controller: Output signal
INTEGER_16
1/10
OSC
Tx
3: Q-current controller: Output signal
INTEGER_16
1/10
OSC
Tx
4: D-voltage (magnetisation)
INTEGER_16
1/10
OSC
Tx
5: Q-voltage (torque)
INTEGER_16
1/10
OSC
Tx
Slip: Actual slip
INTEGER_16
1/10
OSC
Tx
Device: Actual output frequency
INTEGER_16
1/10
OSC
Tx
Motor: Actual position of rotor angle
INTEGER_16
-
OSC
Tx
Axis: Device data
1: Axis: Rated current
UNSIGNED_16
1/100
OSC
Tx
2: Axis: Maximum current
UNSIGNED_16
1/100
OSC
Tx
5: Axis: Supported feedback type
UNSIGNED_8
-
Tx
Axis B - holding brake control
Brake control: Settings
1: Brake: Mode
UNSIGNED_8
-
P
Rx
2: Brake: Application time
UNSIGNED_16
-
P
3: Brake: Release time
UNSIGNED_16
-
P
4: Brake: Brake recognition
UNSIGNED_16
-
5: Brake: Control logic
UNSIGNED_8
-
P
6: Brake monitoring: Response
UNSIGNED_8
-
P
Axis B - device control
Axis command
UNSIGNED_32
-
Axis command: Progress
UNSIGNED_8
-
Device control via PDO: Activation
UNSIGNED_8
-
P
CINH
Mode: Selection
UNSIGNED_8
-
P
CINH
Quick stop: Duration in case of trouble
UNSIGNED_32
-
P
Lenze control word
UNSIGNED_16
-
OSC
Rx
Lenze status word
UNSIGNED_16
-
OSC
Tx
Identification: Status word
UNSIGNED_16
-
OSC
Lenze statusword 2
UNSIGNED_16
-
OSC
Tx
Index
Name
Data type
Scaling
Attributes
Greyed out = read only