0x2d50, 0x3550, An error response in the object – Lenze i700 User Manual
Page 242: 0x2d50:1, 0x3550:1, 8monitoring functions
8
Monitoring functions
8.4
Monitoring of the motor utilisation (I²xt)
242
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
0x2D50 | 0x3550 - motor utilisation (I²xt): Motor overload error
The introduction of a two-component model with two time constants (one for the winding and the
housing/laminated core, respectively) serves to display the thermal behaviour of the motors up to
500% of the rated current.
From version 01.04 onwards
If the disconnection must not or cannot be executed by a higher-level Controller, the operation can be interrupted
by the following parameter setting:
• As a response to the excess of the adjustable error threshold, set "1: Fault" in subindex 1.
• In subindex 2, set the threshold value as error threshold which in case of being exceeded triggers an interruption
of the operation.
Sub.
Name
Lenze setting
Data type
Motor utilisation (I²xt): Response
0: No Response
UNSIGNED_8
Motor utilisation (I²xt): Error threshold
105 %
UNSIGNED_16
Subindex 1:
Motor utilisation (I²xt): Response
Selection list
(Lenze setting printed in bold)
0 No response
1 Fault
Write access CINH OSC P RX TX
UNSIGNED_8
Subindex 2:
Motor utilisation (I²xt): Error threshold
Setting range
(min. value | unit | max. value)
Lenze setting
0
%
250 105 %
Write access CINH OSC P RX TX
UNSIGNED_16
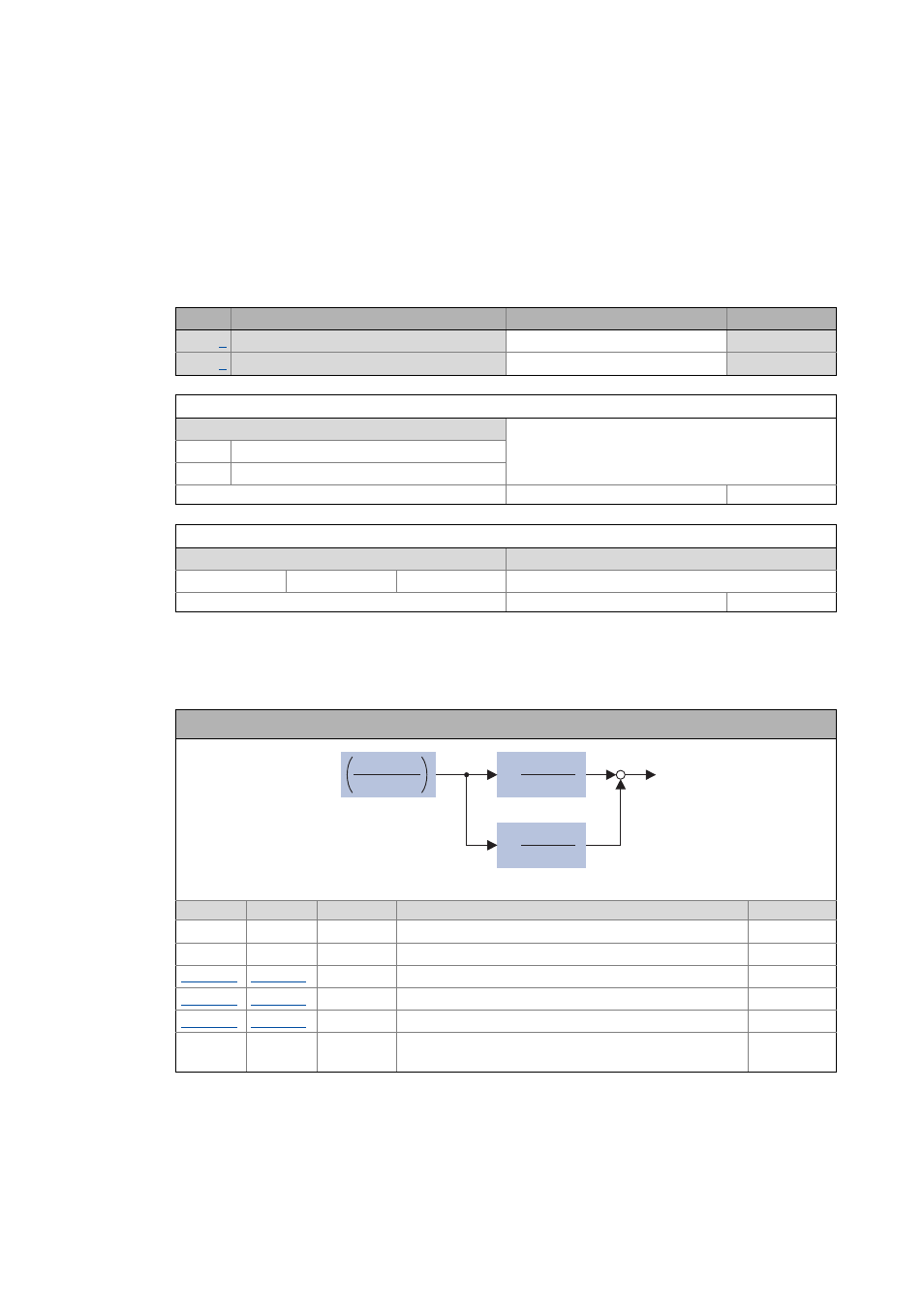
Structure of the I
2
xt monitoring
Thermal utilisation of the motor in [%]
Axis A
Axis B
Symbol Description
Dimension unit
-
-
I
act motor
Actual motor current
A
-
-
I
perm motor
Permissible motor current (speed-dependent)
A
τ
1
Therm. time constant coil
s
τ
2
Therm. time constant of the laminated core
s
k
1
Percentage of the winding in the final temperature
%
-
-
k
2
Percentage of the laminated core in the final temperature:
k
2
= 100 % - k
1
%
k
1
1
(1 + p
)
t
1
k
2
1
(1 + p
)
t
2
I
act motor
I
perm motor
(n)
2