Error code 0x7380: hiperface communication error, Error code 0x8181: ethercat communication, Error code 0x8280: sync manager - address [value – Lenze i700 User Manual
Page 272: 9diagnostics & error management
9
Diagnostics & error management
9.4
CiA402 error codes / error messages
272
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
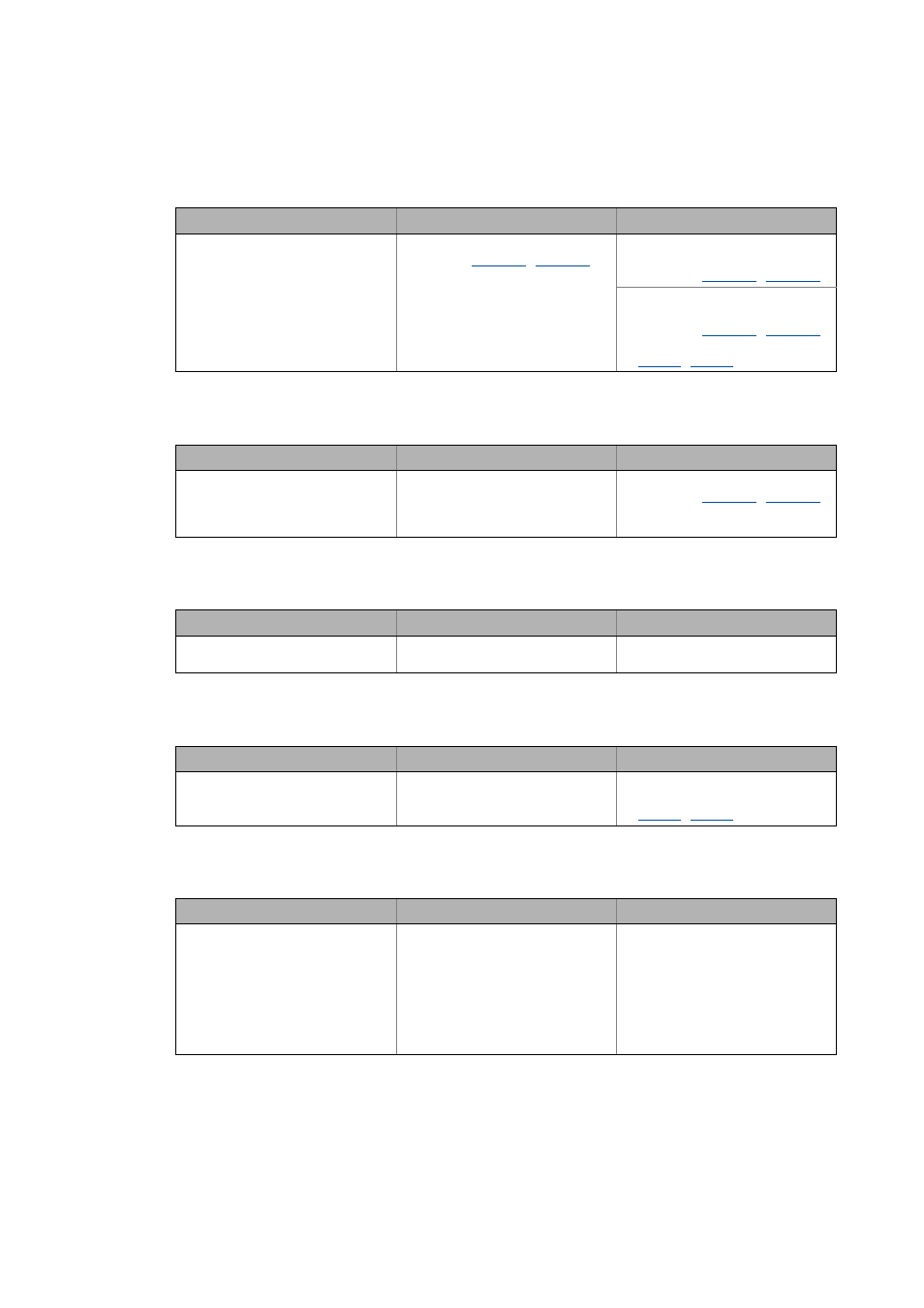
Error code 0x7380: Hiperface communication error
Text ID: 0x3A
Error code 0x7381: Hiperface: Invalid absolute value - motor speed too high
Text ID: 0x41
Error code 0x8180: ECAT DC - synchronisation required
Text ID: 0x15
Error code 0x8181: EtherCAT communication
Text ID: 0x19
Error code 0x8280: Sync Manager - address [value]
Text ID: 0x16
Cause
Remedies
Response
Communication with HIPERFACE®
absolute value encoder is disturbed.
• Check the supply voltage of the
encoder (
|
• Check wiring to the encoder.
Up to and including version 01.05:
Fault
(adjustable in
|
From version 01.06:
Class II fault
(adjustable in
|
• If "fault" is set, the response set in
|
takes place.
Cause
Remedies
Response
The absolute position of the
HIPERFACE® absolute value encoder
cannot be accepted as the motor
rotates too fast.
Let the motor coast.
Fault
(adjustable in
|
Cause
Remedies
Response
EtherCAT DC mode not activated.
(DC = Distributed Clock)
Activate DC mode.
Warning
Cause
Remedies
Response
EtherCAT communication error
• Check EtherCAT bus cabling.
• Select a longer PDI watchdog
time.
Class II fault
• The response set in
|
takes place.
Cause
Remedies
Response
Incorrect Sync Manager setting of the
EtherCAT master.
• Check the devices on the bus.
• Check cabling or sequence of the
devices on the bus.
• Remove the i700 servo inverter
from the project tree and rescan
the bus.
• Check the device description of
the i700 servo inverter.
Fault