11 appendix, 1 table of attributes – Lenze i700 User Manual
Page 299
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
299
11
Appendix
11.1
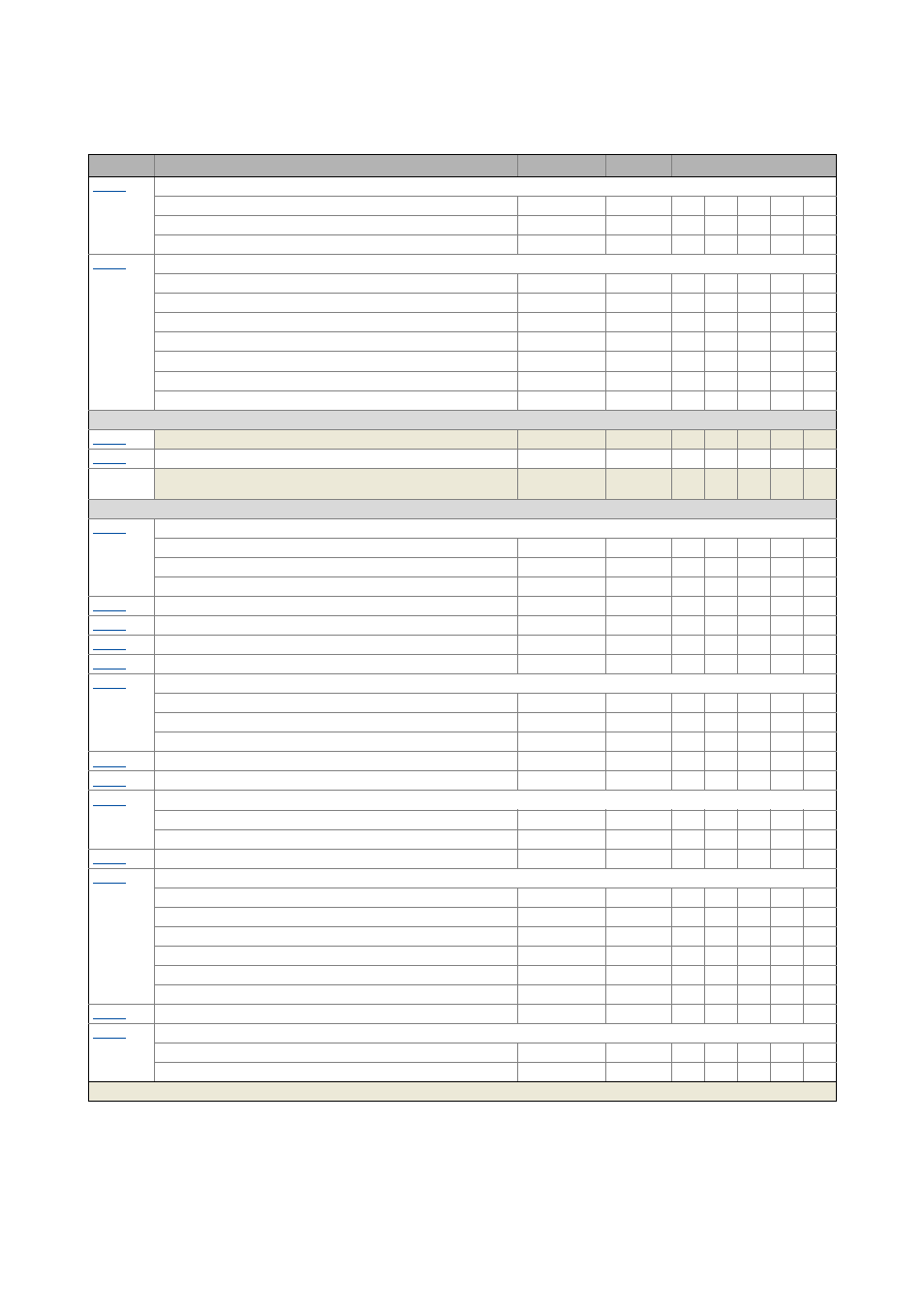
Table of attributes
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Manual test mode: Settings
1: Manual test mode: Setpoint current
INTEGER_16
-
OSC
Rx
2: Manual test mode: Frequency
INTEGER_16
1/10
OSC
Rx
3: Manual test mode: Starting angle
INTEGER_16
1/10
Manual jog: Settings
1: Manual jog: Setpoint current
UNSIGNED_16
-
Rx
2: Manual jog: Frequency
INTEGER_16
1/10
OSC
Rx
3: Manual jog: Ramp time - current
UNSIGNED_16
-
P
4: Manual jog: Ramp time - frequency
UNSIGNED_16
-
P
5: Manual jog: Time monitoring
UNSIGNED_32
-
P
6: Manual jog: Current controller gain
UNSIGNED_32
1/100
P
7: Manual jog: Current controller reset time
UNSIGNED_32
1/100
P
Axis B - error management
Delay time: Reset error
INTEGER_32
-
Reset error
UNSIGNED_8
-
0x304F
Current fault
ARRAY [0..63] OF
BYTE
-
Axis B - controller settings
Speed controller: Parameter
1: Speed controller: Gain
UNSIGNED_32
1/100000
P
2: Speed controller: Reset time
UNSIGNED_16
1/10
P
3: Speed controller: Rate time
UNSIGNED_16
1/100
P
Speed controller: Gain - adaption
UNSIGNED_16
1/100
P
OSC
Rx
Speed controller: Load value
INTEGER_16
1/10
P
OSC
Rx
Speed: Speed setpoint - filter time
UNSIGNED_16
1/10
P
Speed: Actual speed - filter time
UNSIGNED_16
1/10
P
Moments of inertia
1: Moment of inertia: Motor
UNSIGNED_32
1/100
P
2: Moment of inertia: Load
UNSIGNED_32
1/100
P
3: Moment of inertia: Motor-load coupling
UNSIGNED_8
-
P
Switching frequency
UNSIGNED_8
-
P
Current controller: Feedforward control
UNSIGNED_8
-
P
Current controller: Parameter
1: Current controller: Gain
UNSIGNED_32
1/100
P
2: Current controller: Reset time
UNSIGNED_32
1/100
P
Motor: Current setpoint - filter time
UNSIGNED_16
1/100
P
Torque: Notch filter torque setpoint
1: Notch filter 1: Frequency
UNSIGNED_16
1/10
P
2: Notch filter 1: Bandwidth
UNSIGNED_16
1/10
P
3: Notch filter 1: Damping
UNSIGNED_8
-
P
4: Notch filter 2: Frequency
UNSIGNED_16
1/10
P
5: Notch filter 2: Bandwidth
UNSIGNED_16
1/10
P
6: Notch filter 2: Damping
UNSIGNED_8
-
P
Torque: Jerk limitation setpoint
UNSIGNED_16
1/10
P
Cyclic sync torque mode: Speed limitation
1: Speed limitation: Upper speed limit
INTEGER_32
480000/2
31
P
OSC
Rx
2: Speed limitation: Lower speed limit
INTEGER_32
480000/2
31
P
OSC
Rx
Index
Name
Data type
Scaling
Attributes
Greyed out = read only