0x608f | 0x688f - position encoder resolution, 0x6090 | 0x6890 - velocity encoder resolution, 0x608f – Lenze i700 User Manual
Page 191: 0x688f, 0x6090, 0x6890, Lution, 7cia402 device profile
Lenze · i700 servo inverter · Reference manual · DMS 1.5 EN · 03/2014 · TD05
191
7
CiA402 device profile
7.5
Parameters for the scaling of physical values
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
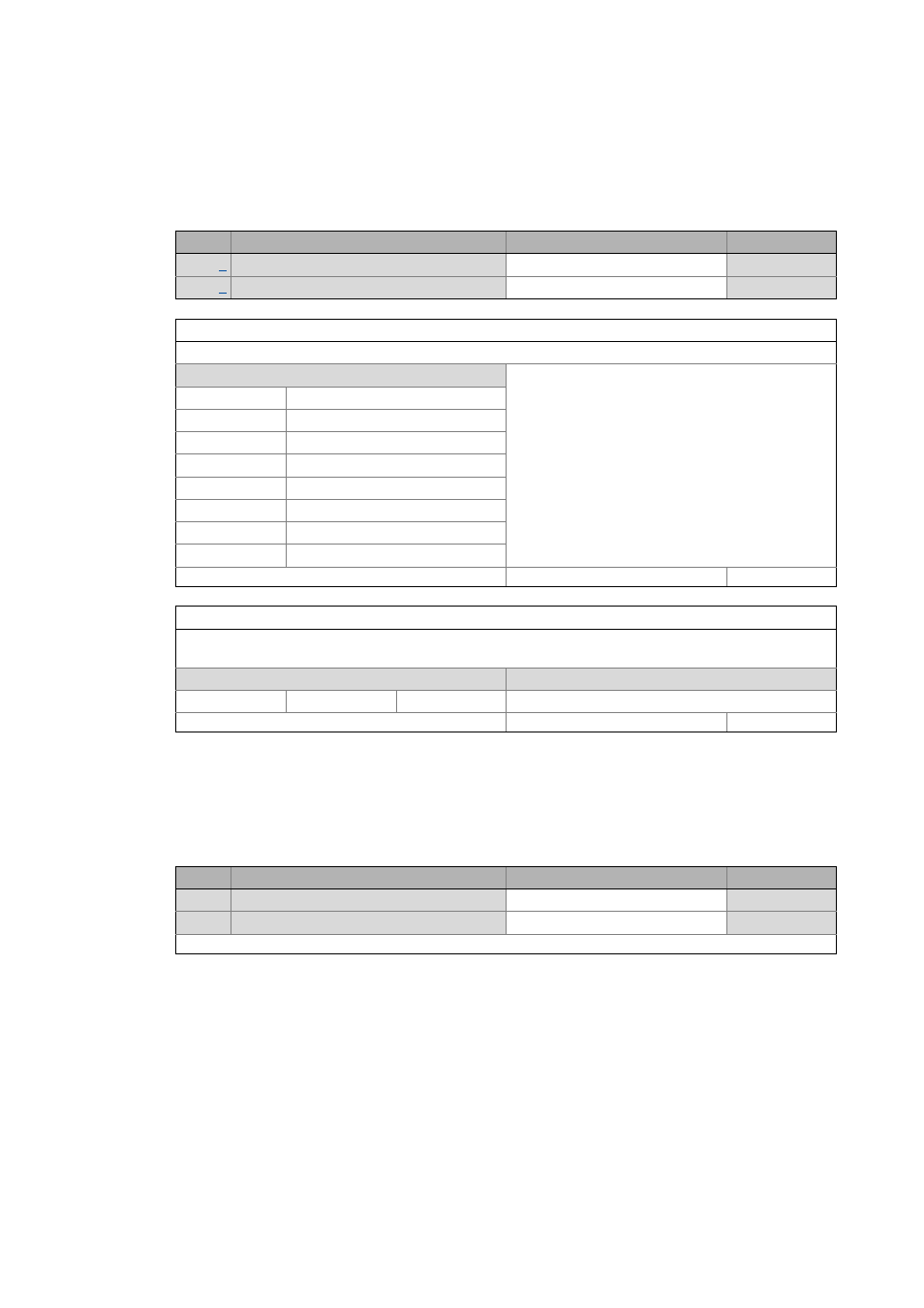
0x608F | 0x688F - Position encoder resolution
0x6090 | 0x6890 - Velocity encoder resolution
Resolution of the position detection by the motor encoder
Sub.
Name
Lenze setting
Data type
Encoder increments
0x00010000: 16 Bit
UNSIGNED_32
Motor revolutions
1
UNSIGNED_32
Subindex 1:
Encoder increments
Setting of the number of bits with which a mechanical motor revolution is to be resolved.
Selection list
(Lenze setting printed in bold)
0x00010000 16 bits
0x00040000 18 bits
0x00100000 20 bits
0x00400000 22 bits
0x01000000 24 bits
0x04000000 26 bits
0x10000000 28 bits
0x40000000 30 bits
Write access CINH OSC P RX TX
UNSIGNED_32
Subindex 2:
Motor revolutions
Number of motor revolutions
• Only the setting "1" is accepted.
Setting range
(min. value | unit | max. value)
Lenze setting
1
1 1
Write access CINH OSC P RX TX
UNSIGNED_32
Note: This object is not used in the firmware and only available for compatibility reasons. Do not use the contained
values for a calculation on the control level.
Sub.
Name
Lenze setting
Data type
1 Incr./s
33554432
UNSIGNED_32
2 Motor revolutions/s
125
UNSIGNED_32
Write access CINH OSC P RX TX