Appendix – Lenze ECSCPxxx User Manual
Page 405
Appendix
Code table
l
405
EDBCSXP064 EN 8.0
IMPORTANT
Possible settings
Code
Selection
Lenze/
{Appl.}
Designation
No.
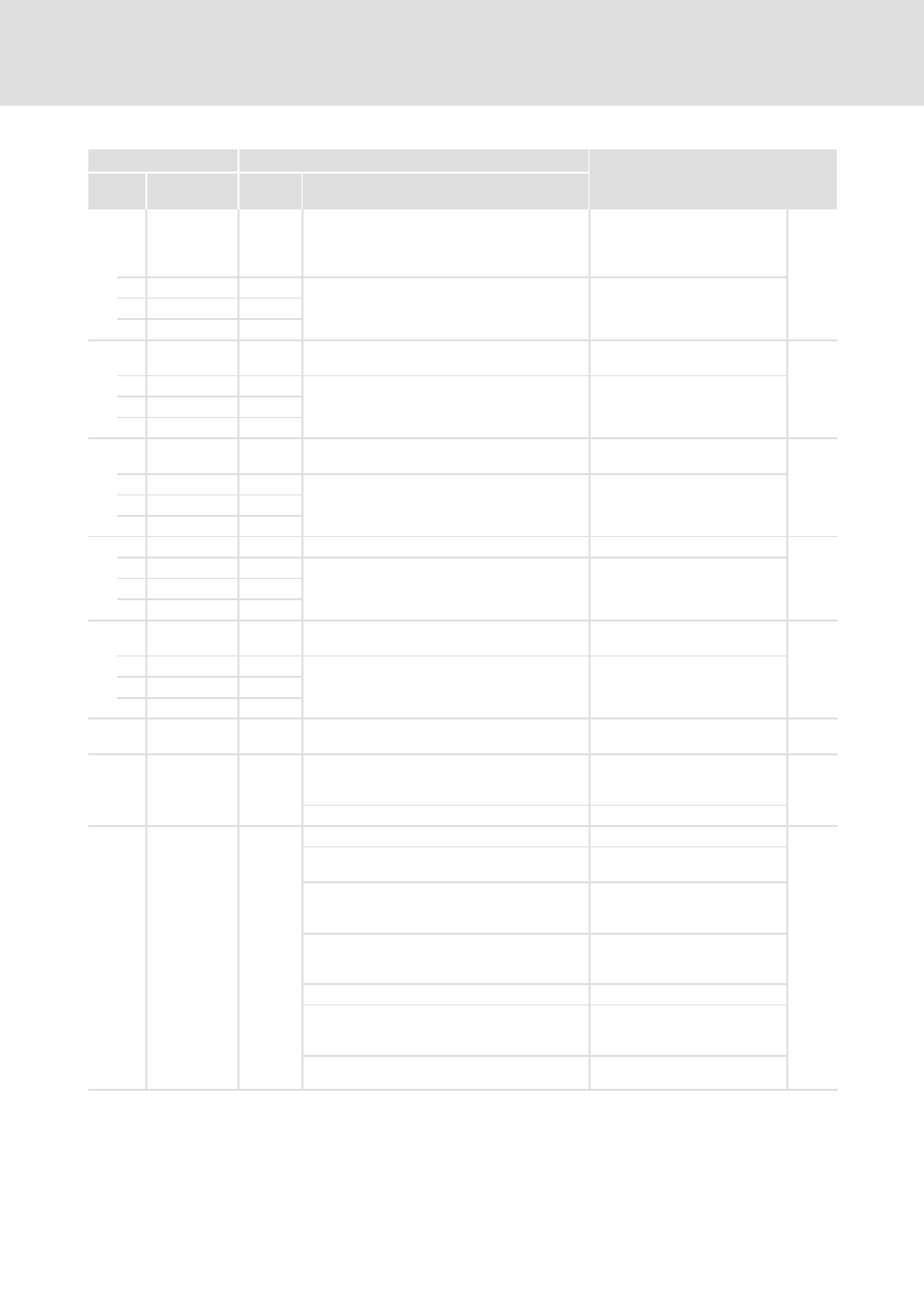
C3200
Parameter "Traversing speed" for
positioning profiles 1 ... 15
Note:
C3063 < [input value]
≤ C3060
^ 98
1 Prof.Velocity
0
−214000.0000
{0.0001
units}
214000.0000
... ...
...
15 Prof.Velocity
0
C3300
Parameter "Acceleration" for
positioning profiles 1 ... 15
^ 98
1 Prof.Acc
0
−0.0000
{0.0001
units}
214000.0000
... ...
...
15 Prof.Acc
0
C3400
Parameter "Deceleration" for
positioning profiles 1 ... 15
^ 98
1 Prof.Dec
0
−0.0000
{0.0001
units}
214000.0000
... ...
...
15 Prof.Dec
0
C3500
Parameter reserved
^ 98
1 Prof.FinalVel
0
−214000.0000
{0.0001
units}
214000.0000
... ...
...
15 Prof.FinalVel
0
C3600
Parameter "Jerk time" for
positioning profiles 1 ... 15
^ 99
1 Prof.JerkTime
0
0.000
{0.001 s}
0.500
... ...
...
15 Prof.JerkTime
0
C3998 Act. Failure
see coding of fault number
Current fault
Read only
^ 343
C3999 Templ.Version
Version of the application
software
Only display
0
{1}
65535
[C4010] Ctrl_Interf
0
Selection of the control interface
^ 155
0
CAN1 (PDO1 with Synch)
MotionBus (CAN) X4
(CAN PDO1, sync−controlled)
1
CANaux1 (PDO1 with Synch)
System bus (CAN) X14
(CAN−AUX PDO1,
sync−controlled)
2
AIF (EtherCAT)
Automation interface (AIF) X1
with EMF2192IB EtherCAT
communication module
3
C4040 (control via codes)
Control via C4040
4
CANaux2 (PDO2 cyclic)
Lenze I/O modules of the EPM
series or Lenze Drive PLC via
CAN−AUX (PDO2, cyclically)
5
CAN3 (PDO3 cyclic)
MotionBus (CAN) X4
(CAN PDO3, cyclically)