1 control word ctrl1, Control word ctrl1, Commissioning – Lenze ECSCPxxx User Manual
Page 159
Commissioning
Process data to the axis module (control word Ctrl1 and setpoints)
Control word Ctrl1
l
159
EDBCSXP064 EN 8.0
6.11.1
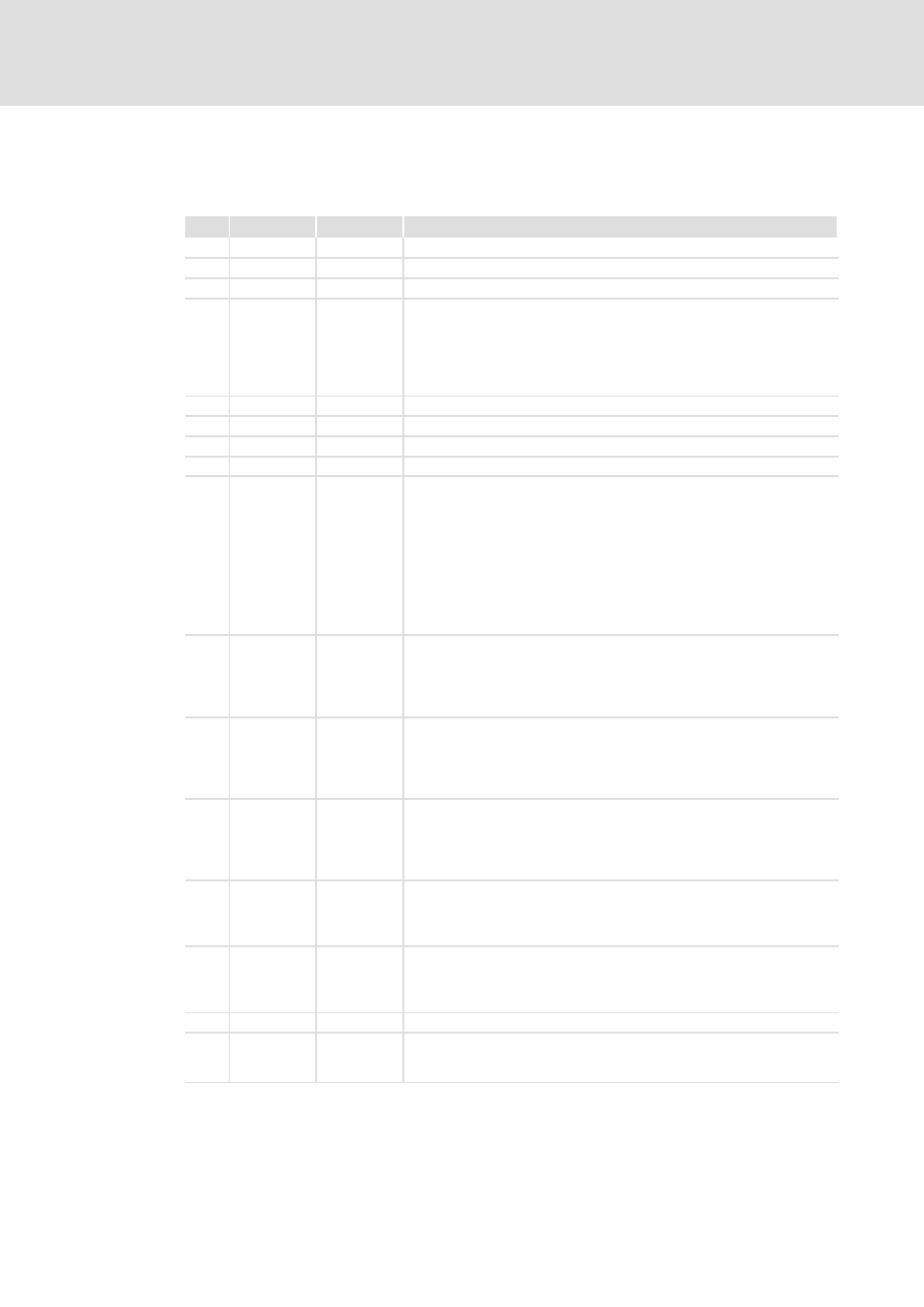
Control word Ctrl1
The control word Ctrl1 contains the following control bits:
Bit
Name
Level
Meaning
0
Func1
HIGH active
Signal selection tx_par1/2, binary coded 2
0
1
Func2
HIGH active
Signal selection tx_par1/2, binary coded 2
1
2
Func4
HIGH active
Signal selection tx_par1/2, binary coded 2
2
3
Quick stop
(QSP)
HIGH active
Quick stop (QSP):
l
0 = No QSP active
l
1 = QSP active
– The drive is braked to a standstill within the QSP deceleration time
(C0150).
– Change to "Stand−by".
4
PNoSet_1
HIGH active
Selection of the positioning profile (binary coded 2
0
)
5
PNoSet_2
HIGH active
Selection of the positioning profile (binary coded 2
1
)
6
PNoSet_4
HIGH active
Selection of the positioning profile (binary coded 22)
7
PNoSet_8
HIGH active
Selection of the positioning profile (binary coded 23)
8
ProfEnable
HIGH active
Start positioning profile:
l
0 = brakes to standstill with current QSP deceleration time (C0150)
– Change to "Stand−by".
– Completing the positioning profiles with profile mode "constant
travel".
– Activating the brake when brake logic is active.
l
1 = start positioning profile (PNoSet_x > 0)
– If status bit Stat1.ProfileBusy = 0 and Stat2.AuxProfileBusy = 0, the
positioning profile concerned can be started immediately by the
selection of a new profile number (PNoSet_x).
9
CINH
HIGH active
Controller inhibit (CINH) − change to "Stand−by":
l
0 = deactivation of ctrl. inhibit
l
1 = activation of ctrl. inhibit
– The power output stages are inhibited.
– All internal controllers are reset.
10
TripSet
HIGH active
Change to "Trouble":
l
The drive is decelerated to standstill within the QSP deceleration time
(C0150).
l
0 = do not set fault message
l
1 = set fault message
11
TripReset
Rising edge
Fault message reset − change to "Stand−by":
l
0−1 edge = reset fault message
– This function resets an active fault message provided that the cause
of the fault has been removed. If the cause of the fault is still active,
there will be no reaction.
12
JogCCW
HIGH active
Manual jog in negative direction of rotation (CCW)
l
0 = change to "Stand−by"
l
1 = manual jog in negative direction of rotation (CCW), "ManualJog"
status
13
JogCW
HIGH active
Manual jog in positive direction of rotation (CW)
l
0 = change to "Stand−by"
l
1 = manual jog in positive direction of rotation (CW), "ManualJog"
status
14
RelLimSwitch HIGH active
Activation of "retracting on/off switch" function.
15
PosDirect
HIGH active
Selection for setpoints in words 2 ... 4 of the process input data:
l
0 = rx_par1, rx_par2, rx_par3
l
1 = VelDirect, PosDirect for direct positioning (C3095/x = 110 ... 113)