Commissioning – Lenze ECSCPxxx User Manual
Page 114
Commissioning
State control of the positioning drive
Conditions for state change (transitions)
l
114
EDBCSXP064 EN 8.0
Ctrl1.JogCCW = 0
[
&
³1
ExitManual
Ctrl1.JogCW = 0
[
Ctrl1.RelLimSwitch = 0 (no retracting)
[
HW limit switch_positive= 1
[
HW limit switch_negative= 1
[
Speed setpoint = 0
[
Stat1.GlobalErr = 1 (fault occurred)
[
Ctrl1.Qsp = 1 (user QSP)
[
Ctrl1.Imp = 1 (pulse inhibit)
[
Stat1.GlobalErr = 0 (no fault)
[
&
EnterHoming
Ctrl1.JogCW = 0
[
Ctrl1.JogCCW = 0
[
Ctrl1.RelLimSwitch = 0 (no retracting)
[
Ctrl1.Qsp = 0 (no user QSP)
[
Ctrl1.Imp = 0 (no pulse inhibit)
[
Ctrl1.ProfEnable = 1
[
(Ctrl1.PNoSet_1 ... Ctrl1.PNoSet_8) > 0
(Positioning profile with C3095/x = 100)
[
Ctrl1.ProfEnable = 0
[
&
³1
ExitHoming
Speed setpoint = 0
[
Stat1.GlobalErr = 1 (fault occurred)
[
Ctrl1.Qsp = 1 (user QSP)
[
Ctrl1.Imp = 1 (pulse inhibit)
[
Ctrl1.HomePosAvailable= 1 (home position known)
[
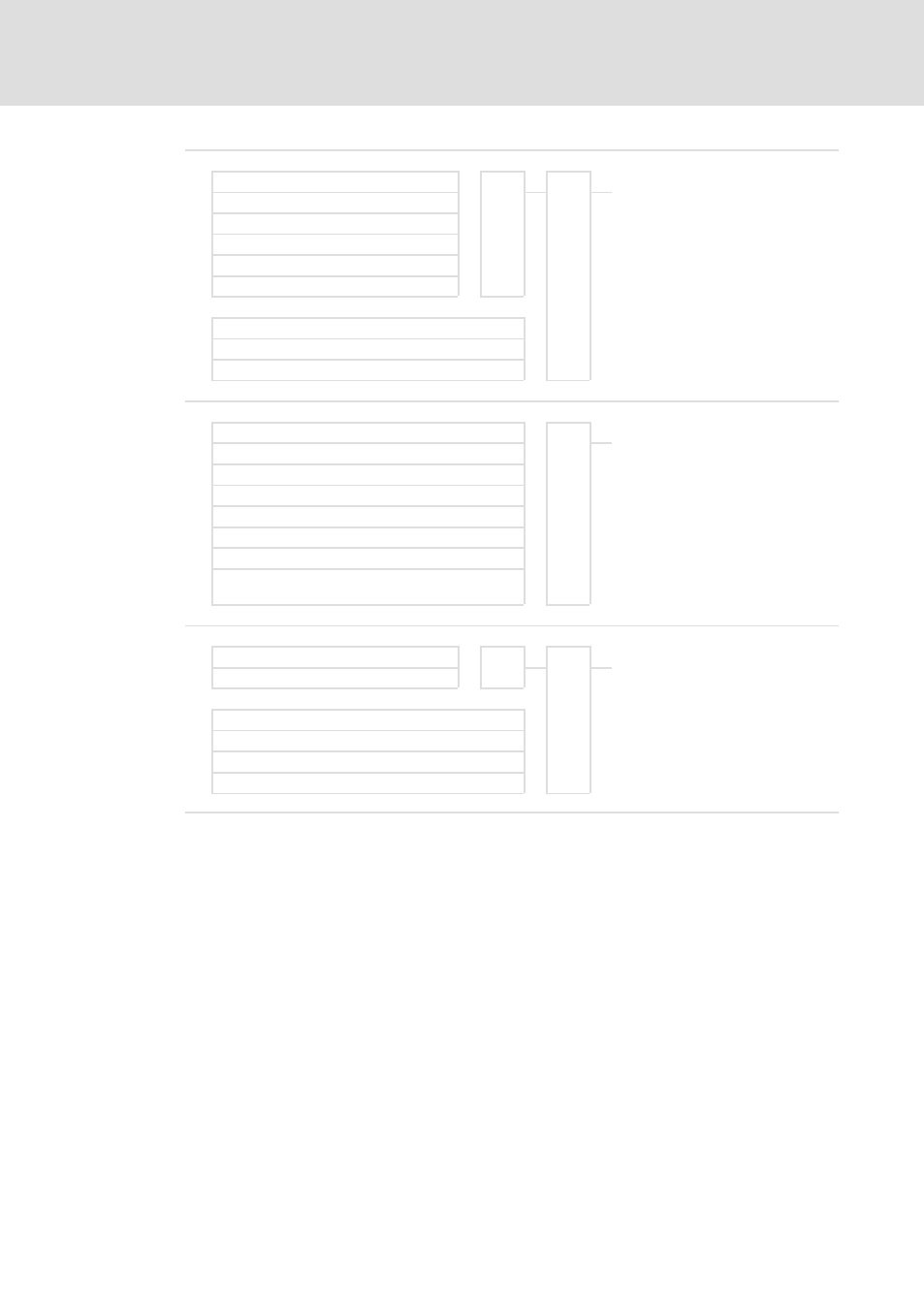
Fig. 6−16
Conditions for state change (transitions)
&
Logic AND operation
³
Logic OR operation
XOR
Logic EXCLUSIVE OR operation
Ctrl1...
Control bits (
^ 158)
Stat1... Status bits (
^ 161)