Troubleshooting and fault elimination – Lenze ECSCPxxx User Manual
Page 351
Troubleshooting and fault elimination
Fault messages
Causes and remedies
l
351
EDBCSXP064 EN 8.0
Remedy
Cause
Description
Fault message
Remedy
Cause
Description
Display
No.
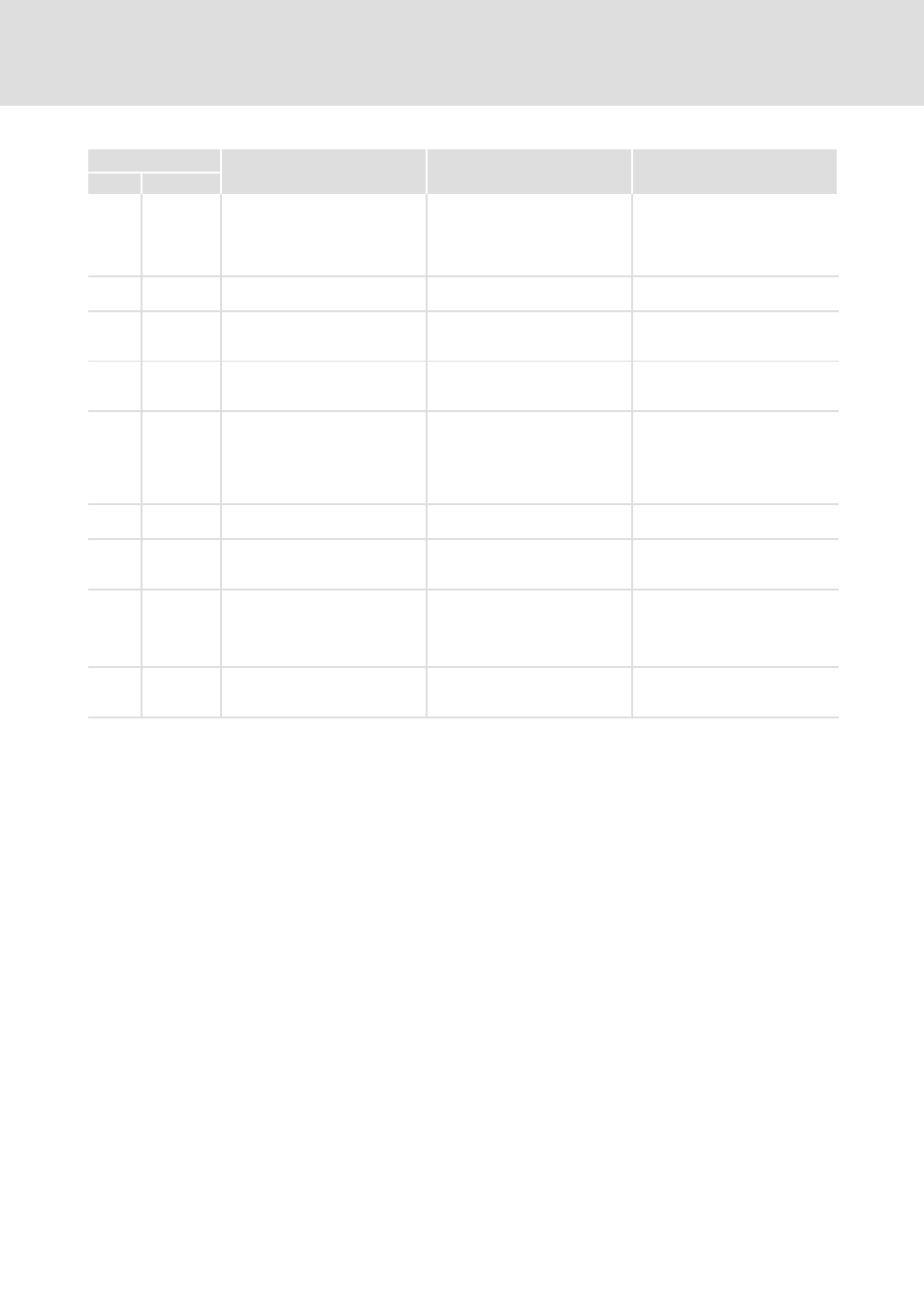
3405
FollowErrFai
l
Following error tolerance (C3030)
reached.
The drive cannot follow the
setpoint.
l
Reduce acceleration.
l
Increase the limit value C3030.
l
Increase current limit C0022
(observe max. motor current).
l
Check drive dimensioning.
3406
HomePosErr Home position has not been
reached.
Positioning profile mode in
C3095/x requires homing.
Execute Homing or "Set
reference".
3409
MaxVelErr
Max. speed in C1240 is set too
high.
Maximum speed C1240 cannot be
reached due to the maximum
speed set in C0011.
Reduce C1240 or increase C0011.
The highest possible value for
C1240 is displayed in C3060.
3417
InvSftwLimi
ts
Impermissible setting of the
software limit positions
Positive software limit position is
lower than the negative one
(C3040 < C3041).
Correct the setting.
0425
InvHoming
Offs
Reference measuring system
offset (C3012) is invalid.
Entry of reference measuring
system offset (C3012) with
inverted motor−/encoder
mounting position (C3000 <>
C3001) and use of MT absolute
value encoder not permitted
Reset reference measuring system
offset (C3012 = 0)
3500
ExtTripSet
External fault has been activated.
Fault has been set externally with
Ctrl1.TripReset.
C4040: reset Ctrl1.TripReset = 0.
3501
InvTpProfN
o
Invalid positioning profile number
with touch probe positioning
Invalid positioning profile
number, e. g. for subsequent
block in touch probe positioning
Select positioning profile
number < 15.
0503
InvalidFeed
b
Impermissible feedback system
selection
The selected feedback system
cannot be combined with the
profile function (e. g. position
feedback = encoder and
C3095 = 31).
Correct the setting.
0504
InvalidOS
Version of operating system is not
compatible.
Application software requires
compact servo ECS with operating
system version
≥ 3.2.
Use suitable hardware and
operating system version
≥ 3.2.
x: 0 = TRIP, 1 = Message, 2 = Warning, 3 = FAIL−QSP