Diagnostics – Lenze ECSCPxxx User Manual
Page 331
Diagnostics
Diagnostics with Global Drive Oscilloscope (GDO)
Diagnostics with GDO
l
331
EDBCSXP064 EN 8.0
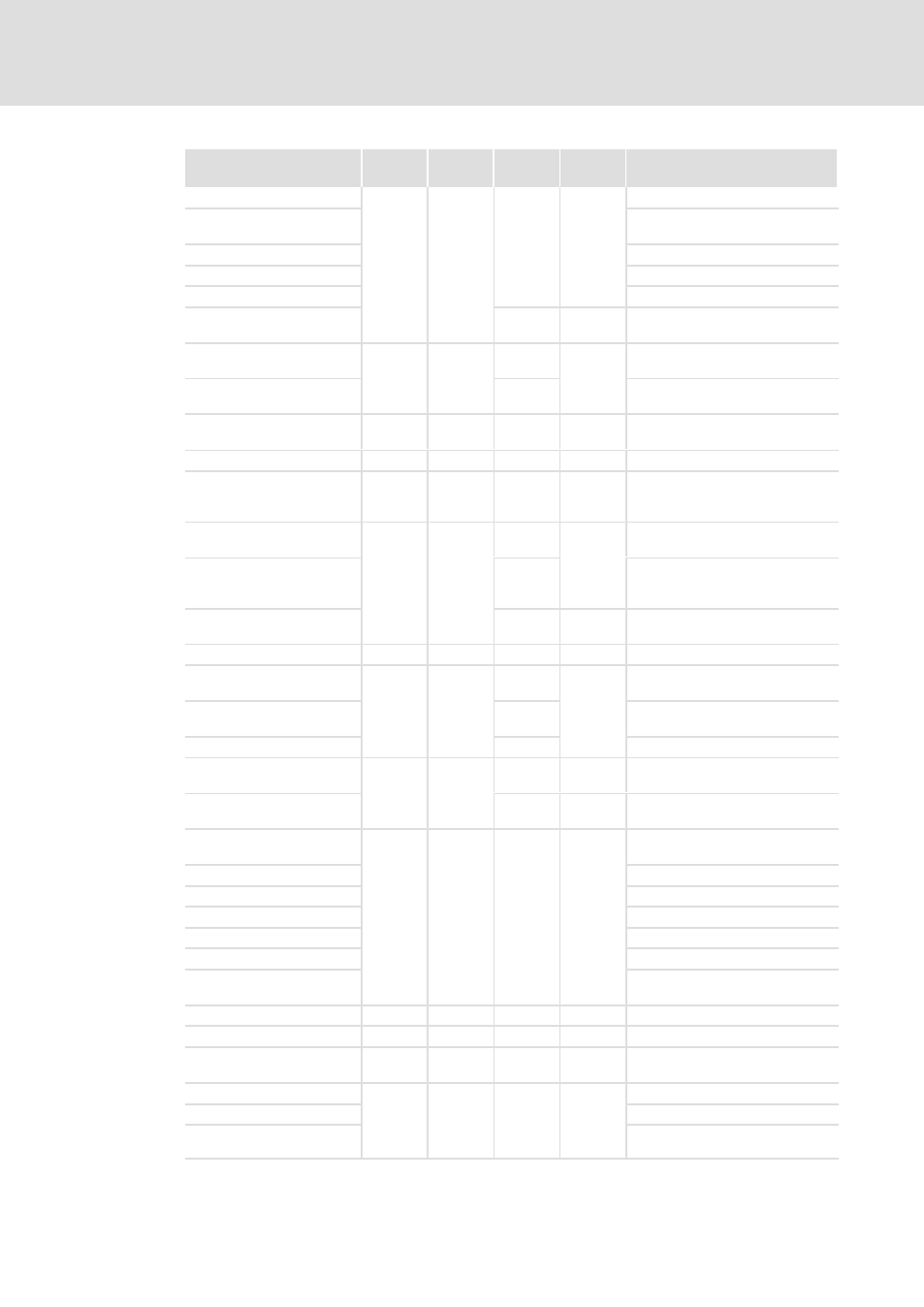
Description
Display
format
Display
Code
Signal
type
Data type
Variable
designation
g_DCTRL_bRdy_b
y
−
−
TRUE = ready for operation
g_DCTRL_bCwCCw_b
TRUE = counter−clockwise rotation,
FALSE = clockwise rotation
g_DCTRL_bNActEq0_b
TRUE = motor speed < C0019
g_DCTRL_bCInh_b
TRUE = controller inhibit active
g_DCTRL_bExternalFault_b
TRUE = external fault
g_MCTRL_bQspOut_b
C0907/3
bin
TRUE = drive carries out quick stop
(QSP)
g_MCTRL_nHiMLim_a
integer
analog
C0906/4
dec [%]
Upper torque limitation
l
in % of C0057
g_MCTRL_nLoMLim_a
C0906/3
Lower torque limitation
l
in % of C0057
g_MCTRL_bNMSwt_b
Bool
binary
C0907/2
bin
TRUE = torque control
FALSE = speed control
g_MCTRL_bnNAdapt_a
integer
analog
−
−
Adaptive Vp of the speed controller
g_MCTRL_bILoad_b
Bool
binary
C0907/4
bin
TRUE = integral action component
of the speed controller is accepted
by MCTRL_nISet_a.
g_MCTRL_nISet_a
integer
analog
C0906/8
dec [%]
Integral action component of the
speed controller
g_MCTRL_nPAdapt_a
C0906/9
Influence of C0254 on Vp (in %)
l
The sum (without sign) is
edited.
g_MCTRL_nPosLim_a
C0906/5
dec [%]
Influence of the angle controller
l
in % of n
max
(C0011)
g_MCTRL_bPosOn_b
Bool
binary
C0907/1
−
TRUE = activate angle controller
g_MCTRL_nNStartMLim_a
integer
nalog
C0906/6
dec [%]
Lower speed limit at speed
limitation
g_MCTRL_nMAdd_a
C0906/2
Additional torque setpoint or
torque setpoint
g_MCTRL_nFldWeak_a
C0906/7
Motor control
g_MCTRL_bQspIn_b
Bool
binary
binary
C0042
bin
TRUE = drive carries out quick stop
(QSP)
g_MCTRL_bMMax_b
−
−
TRUE = speed controller operates
within the limitation.
g_MCTRL_bIMax_b
Bool
binary
binary
−
−
TRUE = drive operates at current
limit C0022.
g_MCTRL_bUndervoltage_b
Monitoring: undervoltage
g_MCTRL_bOvervoltage_b
Monitoring: overvoltage
g_MCTRL_bShortCircuit_b
Monitoring: short circuit
g_MCTRL_bEarthFault_b
Monitoring: earth fault
g_MCTRL_bIxtOverload_b
Monitoring: I x t overload
g_MCTRL_bNmaxFault_b
Monitoring: max. system speed
exceeded.
g_MCTRL_nNmaxC11
integer
−
−
−
Display of max. speed (C0011)
g_MCTRL_bActTPReceived_b
Bool
binary
−
−
Touch Probe (TP) received.
g_MCTRL_bActIncLastScan_b
double
integer
position
−
−
Dinc between Touch Probe (TP) and
Start of Task
g_MCTRL_bResolverFault_b
Monitoring: Resolver fault
g_MCTRL_bEncoderFault_b
Monitoring: Encoder fault
g_MCTRL_bSensorFault_b
Monitoring: Absolute value
encoder fault