2 state control of the positioning drive, State control of the positioning drive, Commissioning – Lenze ECSCPxxx User Manual
Page 110
Commissioning
State control of the positioning drive
l
110
EDBCSXP064 EN 8.0
6.2
State control of the positioning drive
Ex
itM
an
ua
l
En
ter
Ma
nu
al
En
terT
rou
ble
Exit
Tro
uble
En
terH
om
ing
Exit
Ho
min
g
Ex
itP
os
itio
nin
g
En
ter
Po
sit
ion
ing
Device
enable
Stand-By
Init
Init Ok
Positioning
Homing
Trouble
ManualJog
PosFunctions
Stat1.PStateTrouble = 1 (TRUE)
Stat1.PStateManJog = 1 (TRUE)
Stat1.PStateHome = 1 (TRUE)
Stat1.PStatePos = 1 (TRUE)
ECSXA403
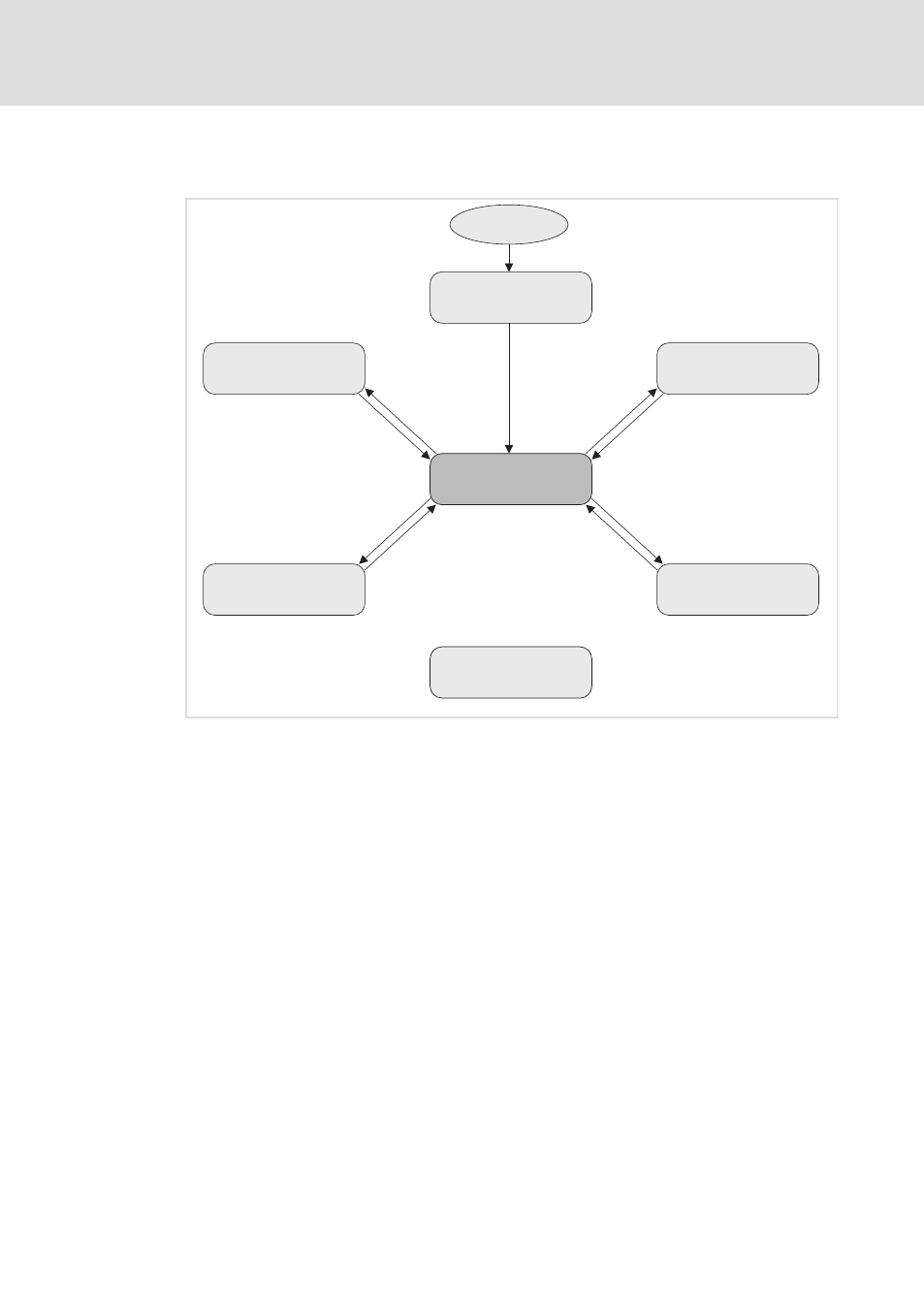
Fig. 6−15
State representation of positioning drive
The ECSxP position controller contains a state machine with a corresponding state control.
In each state, a related function is processed.
State changes (transitions; e.g. "EnterTrouble") take place under certain conditions.
During one program cycle, only one of the states is really active. This does not apply to the
"PosFunctions" state which is always processed in parallel.
The "Stand−by" state is of central importance since it is always activated when a state
changes to another. If you change e.g. from "Trouble" to "ManualJog", "Stand−By" will be
active for one cycle.
Use the "Enter..." transitions (see illustration) to change from "Stand−By" to another state
("Homing", "Trouble", ...) of the state machine.
Use the "Exit..." transitions to change back to the central "Stand−by" state.