Commissioning – Lenze ECSCPxxx User Manual
Page 166
Commissioning
Entry of machine parameters
l
166
EDBCSXP064 EN 8.0
IMPORTANT
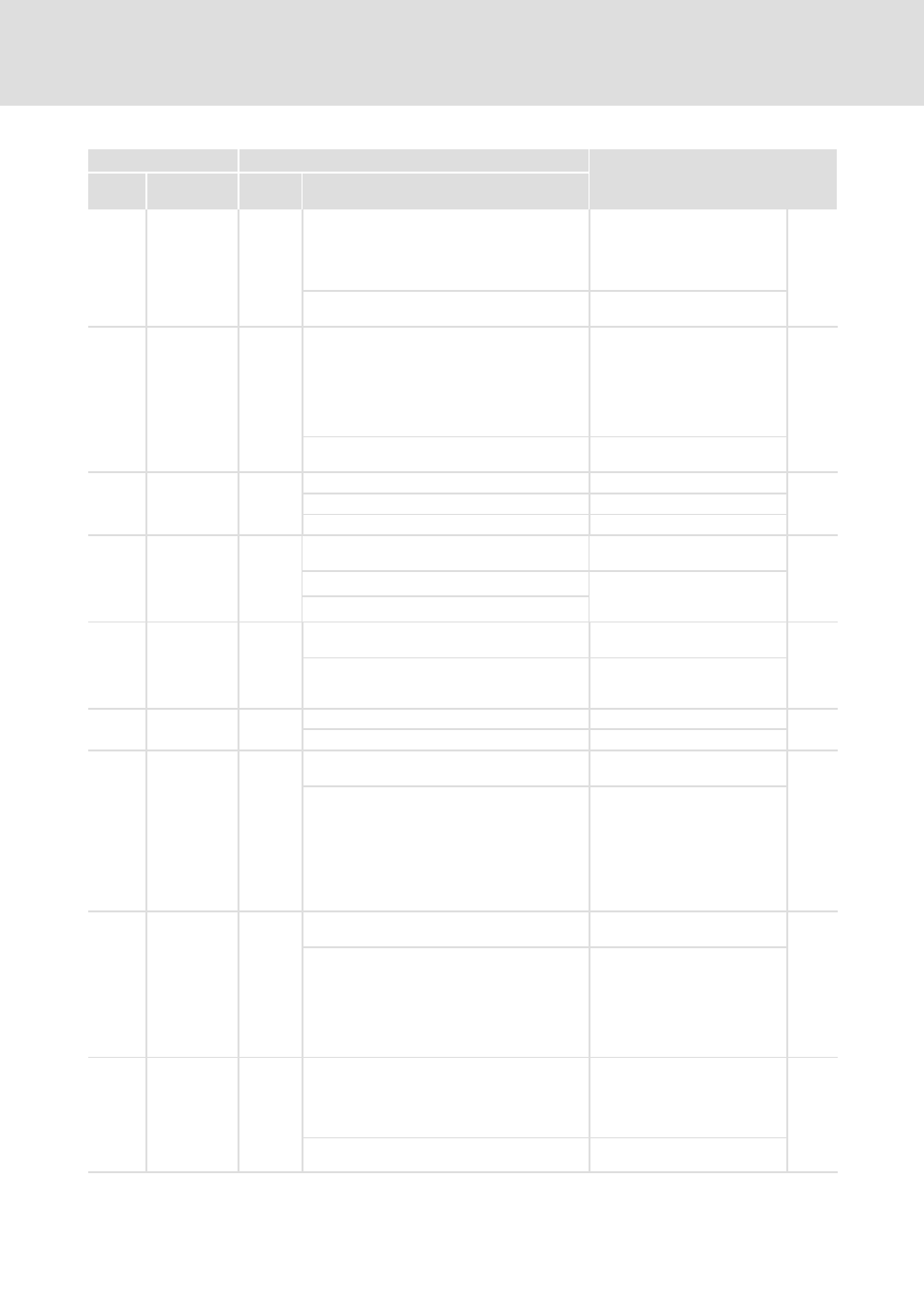
Possible settings
Code
Selection
Lenze/
{Appl.}
Designation
No.
C1240 Vel_max
18000.0
Max. permissible speed of the
load (slide).
Note: Enter the motor speed
resulting from Vel_max plus 10%
reserve in C0011!
^ 103
0.0001
{0.0001
units/s}
214000.0000
C1250 Acc_max
36000.0
Max. acceleration
Note: This parameter among
other things depends on the
motor torque and the moment
of inertia of the entire mechanics
driven during the positioning
process!
^ 103
0.0001
{0.0001
units/s
2
}
214000.0000
C3000 MotDirInv
0
Motor mounting position
0
Normal (direction of rotation CW)
1
Inverse (direction of rotation CCW)
C3001 EncDirInv
0
Position encoder mounting
position
0
Normal (direction of rotation CW)
Direction of rotation with regard
to the motor’s direction of
rotation
1
Inverse (direction of rotation CCW)
C3017 Lim.n=0−Flag
0.10
Limit value for speed, (n
min
signal)
^ 231
0.01
{0.01 %}
100.00 If the value falls below the limit
value, the status bit Stat2.Nmin
is set to 1.
C3018 Hyst.n=0−Flag
0.10
Hysteresis for speed (n
min
signal)
^ 231
0.00
{0.01 %}
100.00
C3030 FollErrWarn
360.0
Following error tolerance
(warning)
^ 233
0.0000
{0.0001
units}
214000.0000 If the tolerance is exceeded, the
"FollowErr" warning will be
triggered. The status bit
Stat2.FollowErrWarn is set to "1"
(TRUE).
Note: The acceptance of changed
settings requires a status change
via the "Stand−By" status!
C3031 FollowErrQSP
720.0
Following error tolerance
(Fail−QSP)
^ 233
0.0000
{0.0001
units}
214000.0000 If the tolerance is exceeded, the
Fail−QSP "FollowErr" fault is
triggered and the drive is
stopped through the QSP ramp.
Note: The acceptance of changed
settings requires a status change
via the "Stand−By" status!
C3034 Target
Window
360.0
Total width of the target position
window
Layout: Half of the window
width before and after the target
position
^ 229
−0.0000
{0.0001
units}
65536.0000