9 setting of positioning profile parameters, Setting of positioning profile parameters, 201) are defined in the positioning profile – Lenze ECSCPxxx User Manual
Page 201: Commissioning
Commissioning
Setting the positioning profile
Setting of positioning profile parameters
l
201
EDBCSXP064 EN 8.0
6.17.9
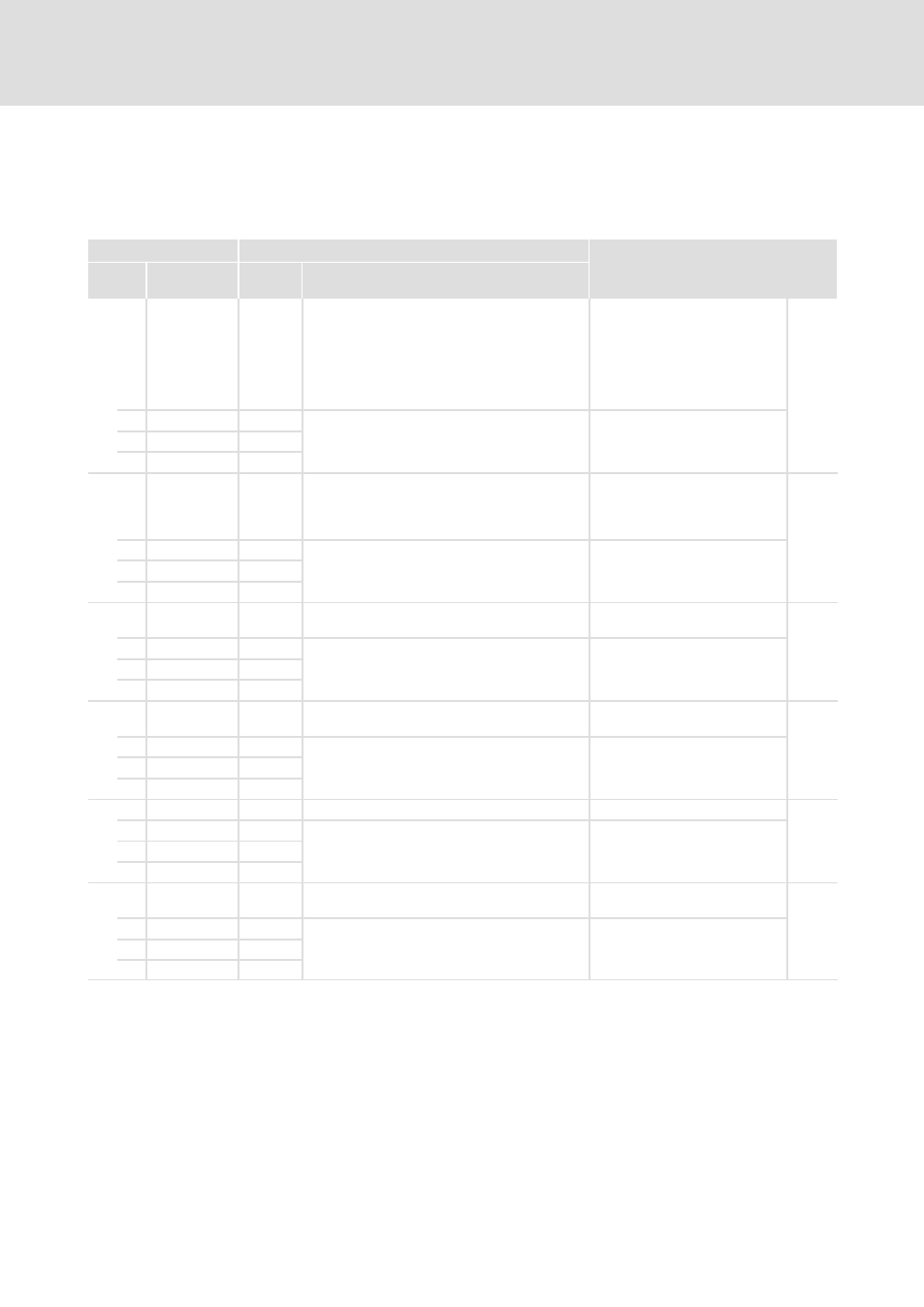
Setting of positioning profile parameters
The target position, traversing speed, acceleration, deceleration, and jerk time for the
positioning profile parameters can be set via the following codes:
Code
Possible settings
IMPORTANT
No.
Designation
Lenze/
{Appl.}
Selection
C3100
Parameter "Target position" for
positioning profiles 1 ... 15
Note: Input value must be within
the range of the
± value
from C4265.
l
Example: C4265 = 10000
ð
value range −10000 ... +10000
^ 97
1 Prof.Position
0
−214000.0000
{0.0001
units}
214000.0000
... ...
...
15 Prof.Position
0
C3200
Parameter "Traversing speed" for
positioning profiles 1 ... 15
Note:
C3063 < [input value]
≤ C3060
^ 98
1 Prof.Velocity
0
−214000.0000
{0.0001
units}
214000.0000
... ...
...
15 Prof.Velocity
0
C3300
Parameter "Acceleration" for
positioning profiles 1 ... 15
^ 98
1 Prof.Acc
0
−0.0000
{0.0001
units}
214000.0000
... ...
...
15 Prof.Acc
0
C3400
Parameter "Deceleration" for
positioning profiles 1 ... 15
^ 98
1 Prof.Dec
0
−0.0000
{0.0001
units}
214000.0000
... ...
...
15 Prof.Dec
0
C3500
Parameter reserved
^ 98
1 Prof.FinalVel
0
−214000.0000
{0.0001
units}
214000.0000
... ...
...
15 Prof.FinalVel
0
C3600
Parameter "Jerk time" for
positioning profiles 1 ... 15
^ 99
1 Prof.JerkTime
0
0.000
{0.001 s}
0.500
... ...
...
15 Prof.JerkTime
0