2 conditions for state change (transitions), Conditions for state change (transitions), Commissioning – Lenze ECSCPxxx User Manual
Page 113
Commissioning
State control of the positioning drive
Conditions for state change (transitions)
l
113
EDBCSXP064 EN 8.0
6.2.2
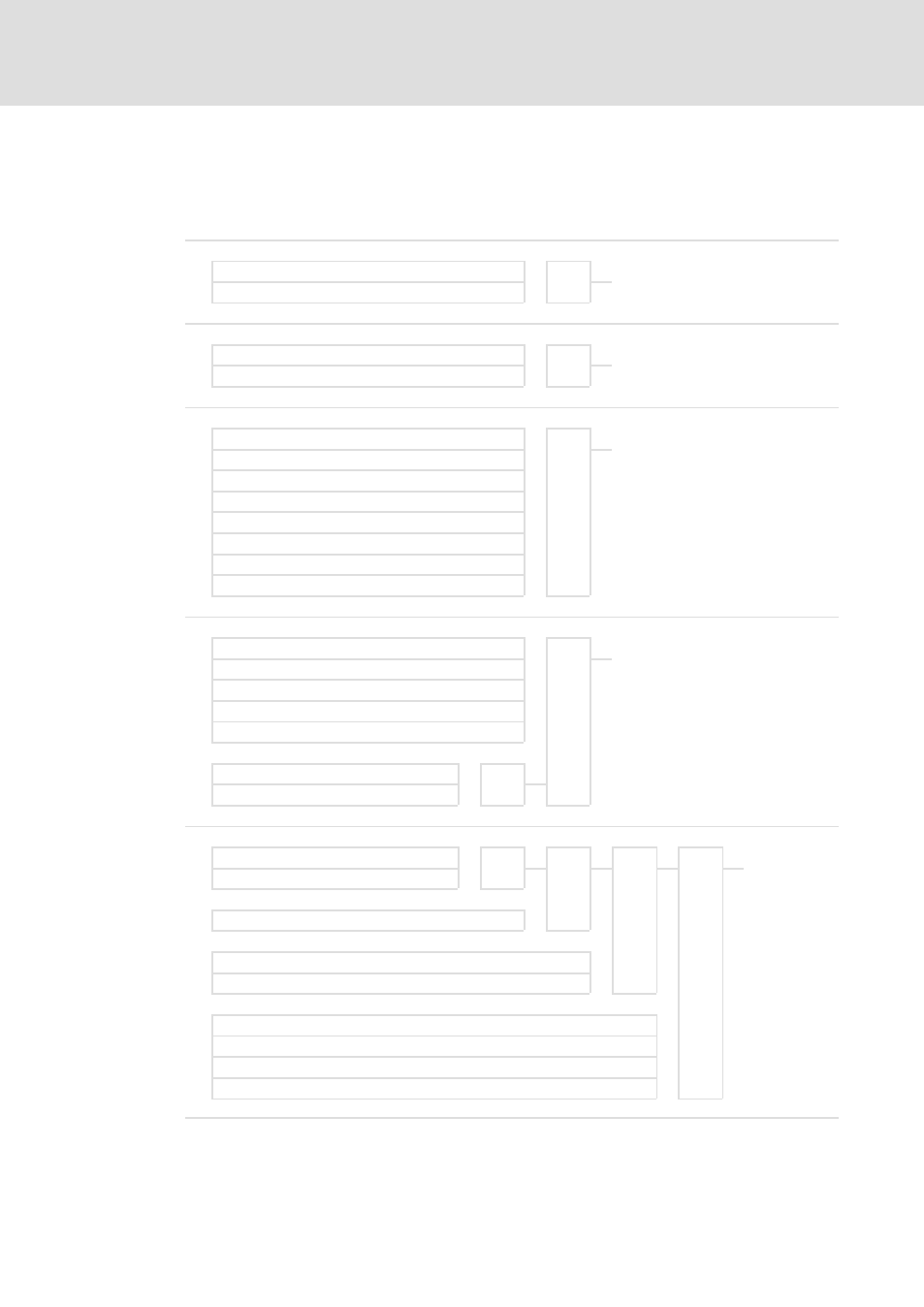
Conditions for state change (transitions)
The figure below shows the conditions to be fulfilled for the individual state changes in the
form of logic operations:
Ctrl1.TripSet = 0 (set fault message)
[
³1
EnterTrouble
Fault active
[
Ctrl1.TripReset = 1 (fault message reset)
[
&
ExitTrouble
No current fault
[
Stat1.GlobalErr = 0 (no fault)
[
&
EnterPositioning
Ctrl1.JogCW = 0
[
Ctrl1.JogCCW = 0
[
Ctrl1.RelLimSwitch = 0 (no retracting)
[
Ctrl1.Qsp = 0 (no user QSP)
[
Stat1.Imp = 0 (no pulse inhibit)
[
Ctrl1.ProfEnable = 1
[
(Ctrl1.PNoSet_1 ... Ctrl1.PNoSet_8) > 0
[
Ctrl1.TripSet = 1
[
³1
ExitPositioning
Stat1.GlobalErr = 1 (fault occurred)
[
Ctrl1.Qsp = 1 (user QSP)
[
Ctrl1.CINH = 1 (controller inhibit)
[
Stat1.Imp = 1 (pulse inhibit)
[
Ctrl1.ProfEnable = 0
[
&
Speed setpoint = 0
[
HW limit switch_positive= 1
[
XOR
&
³1
&
EnterManual
HW limit switch_negative= 1
[
Ctrl1.RelLimSwitch = 1 (retracting activated)
[
Ctrl1.JogCCW = 1
[
Ctrl1.JogCW = 1
[
Stat1.GlobalErr = 0 (no fault)
[
Ctrl1.ProfEnable = 0
[
Ctrl1.Qsp = 0 (no user QSP)
[
Ctrl1.Imp = 0 (no pulse inhibit)
[