Appendix – Lenze ECSCPxxx User Manual
Page 397
Appendix
Code table
l
397
EDBCSXP064 EN 8.0
IMPORTANT
Possible settings
Code
Selection
Lenze/
{Appl.}
Designation
No.
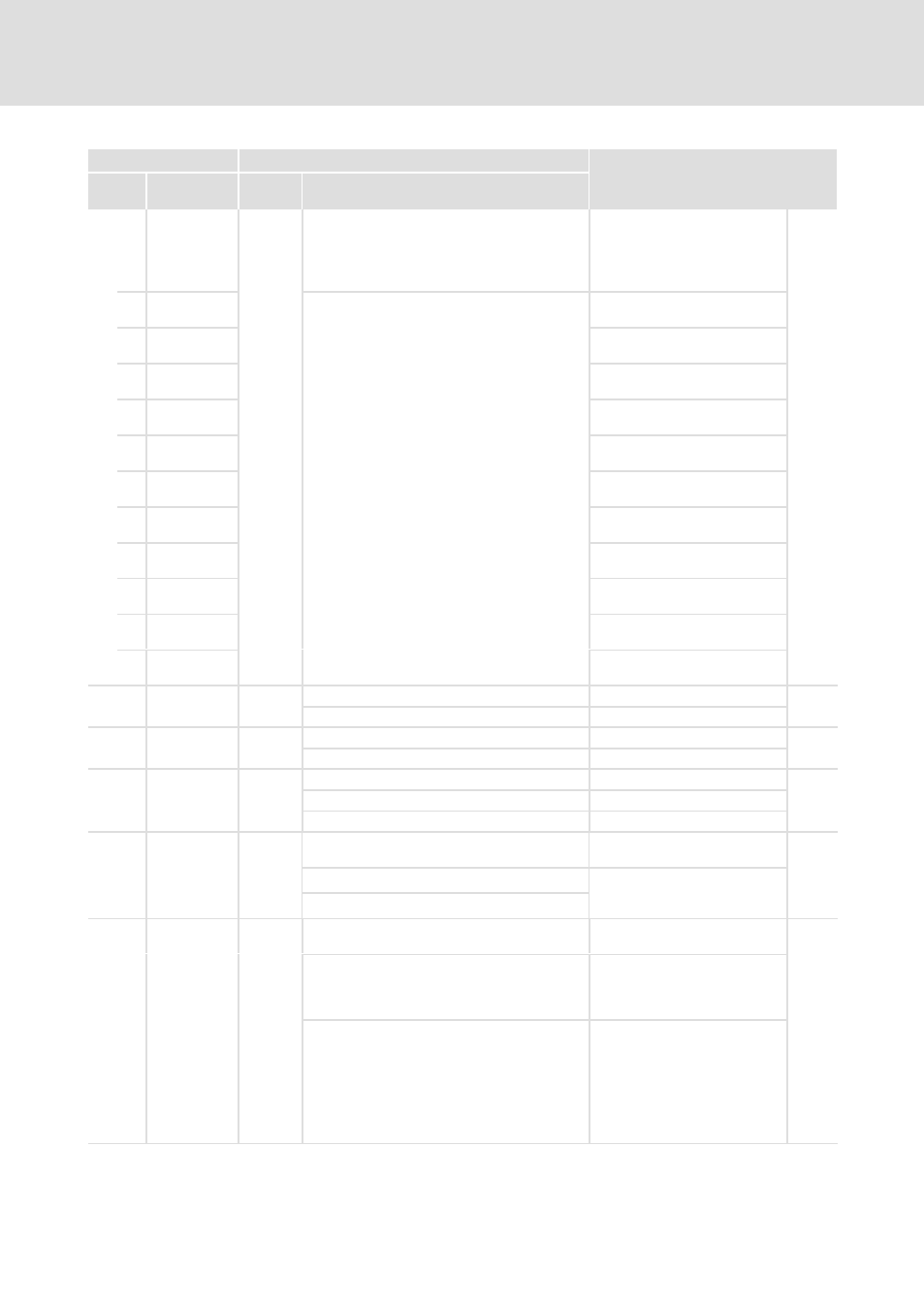
C2493
Process data output words
(decimal) for CAN bus interface
X14
100.00% = 16384
Read only
1 CANa OUT
words
−199.99
{0.01 %}
199.99 CANaux1_OUT word 1
2 CANa OUT
words
CANaux1_OUT word 2
3 CANa OUT
words
CANaux1_OUT word 3
4 CANa OUT
words
CANaux2_OUT word 1
5 CANa OUT
words
CANaux2_OUT word 2
6 CANa OUT
words
CANaux2_OUT word 3
7 CANa OUT
words
CANaux2_OUT word 4
8 CANa OUT
words
CANaux3_OUT word 1
9 CANa OUT
words
CANaux3_OUT word 2
10 CANa OUT
words
CANaux3_OUT word 3
11 CANa OUT
words
CANaux3_OUT word 4
C2500
PLC flag 1 ... 255
0
{1}
65535
C2501
PLC flag 256 ... 512
0
{1}
65535
C3000 MotDirInv
0
Motor mounting position
0
Normal (direction of rotation CW)
1
Inverse (direction of rotation CCW)
C3001 EncDirInv
0
Position encoder mounting
position
0
Normal (direction of rotation CW)
Direction of rotation with regard
to the motor’s direction of
rotation
1
Inverse (direction of rotation CCW)
C3002 NoChangeOf
Pos
0
Resolver as absolute value
encoder
^ 135
0
ChangeOfPos
After "mains off/on", homing
has to be carried out.
The actual position is initialised
with the value "0".
1
NoChangeOfPos
The actual position value is
initialised with the position
value at "Mains off" and is used
further at "Mains on".
Homing is not required.
Note: With "Mains off" the
feedback system must rotate less
than
± 0.5 revolutions.