Monitoring the safety function with a plc, Safety engineering – Lenze EVS9332xK User Manual
Page 435
Safety engineering
Functional test
Monitoring the safety function with a PLC
11.5
11.5.3
l
11.5−3
EDSVS9332K EN 8.0−07/2013
11.5.3
Monitoring the safety function with a PLC
K
SR
µC
PWM
PWM
RFR
DC 24 V
Z1
9300
S1
S2
IN 1
IN 2
IN 3
IN 4
X11/34
X11/33
X11/K32
X11/K31
X5/28
DIGOUT
9300vec104
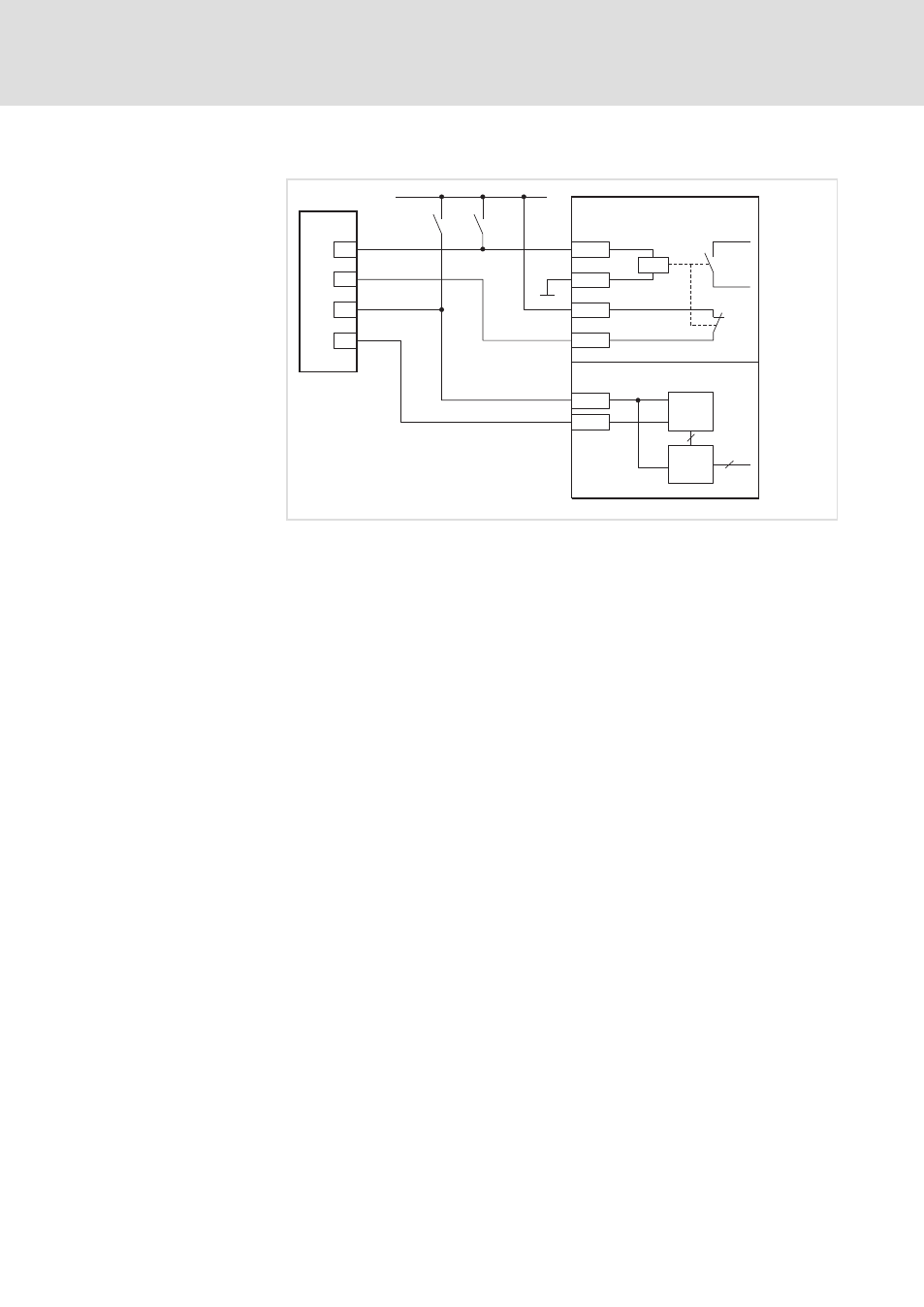
Fig. 11.5−1
Circuit diagram for monitoring the safety function with a PLC
S1, S2
Separate disconnection options of the two disconnecting paths
K
SR
Safety relay
X11/34
Safety relay control
X11/33
Safety relay control (GND)
X11/K32 Forcibly guided feedback contact (24 V)
X11/K31 Forcibly guided feedback contact
DIGOUT
Digital output for evaluating the motor current
X5/28
Controller inhibit
Z1
Programmable logic controller (PLC)
IN 1 − 4
Digital inputs
The following conditions must be met:
ƒ The PLC must be programmed such that the complete system is set to a
safe state immediately when the function check leads to an
impermissible state.
ƒ The parameter setting of a digital output must be such that you can
conclude to the output current I
motor
of the drive (see parameterisation
example).
Requirements