3 serial communication function, Green series communications – Yokogawa Data Acquisition with PID Control CX2000 User Manual
Page 26
1-9
IM 04L31A01-17E
Functional Explanation
1
1.3
Serial Communication Function
If you specified the RS-422/485 or RS-232 serial interface for the communication
interface, you can connect various instruments such as PCs, controllers, instruments that
support the Modbus (RTU) protocol, and PLCs.
To use this function, the serial interface must be set to match the settings of the
connected instrument. Below are settings required in each protocol.
Communication Method
Normal (command communications
using dedicated protocol)
Modbus
(when the CX is set to master)
Modbus
(when the CX is set to slave)
Ladder communications
Baud Rate Data Length Parity Check Handshaking Address
Yes
Yes
Yes
Yes
Yes*
Yes
Yes
Yes
Yes
Yes
Yes
Yes
Yes
No
No
No
No
No
No
No
Yes: Setting is required. No: Setting is not required.
* Not required in an RS-232 connection.
Note
For details on how to set the serial interface, see chapter 3.
Green Series Communications
By connecting controllers such as UT Series Controllers made by Yokogawa M&C
Corporation to the RS-422/485 serial interface of the CX, you can perform operations
from the CX such as changing the settings on the controller or retrieving the measured
data from the controller and displaying the data on the CX display.
Up to 16 loops (four loops on the CX1000) of controllers can be connected. The process
values, target setpoints, and output values of each loop can be shown on the CX display.
The log can be stored as a file.
Below are the requirements for connecting controllers to the CX.
• Green series communication option (/CM1) is required on the CX.
• Controllers must have the Modbus (RTU) communication function.
• The controllers must be configured beforehand to perform communications with the
CX.
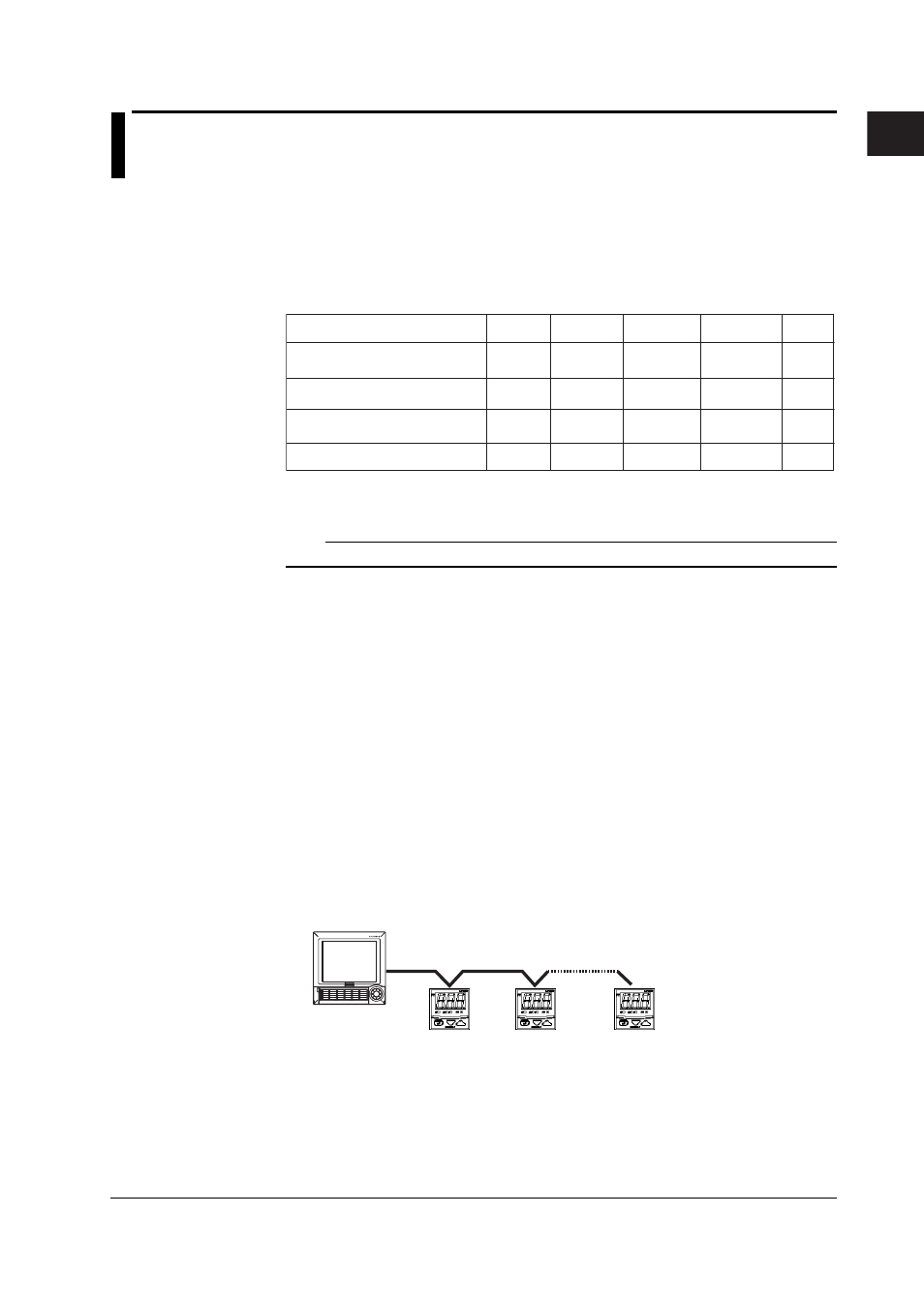
• The serial interface protocol on the CX must be set to Modbus master; the serial
interface protocol of the connected controller must be set to Modbus slave.
CX
Modbus master
Modbus slave
UT Green
series
controller
UT Green
series
controller
UT Green
series
controller