Outputs – Lenze E94AxHE Technology Application CiA402 Device profile User Manual
Page 178
9400 Technology applications | CiA402 device profile
Parameter setting & configuration
Internal interfaces | function block "L_CiA402DeviceProfile"
178
L
EDS94TA11010xxxx EN 1.2 - 03/2010
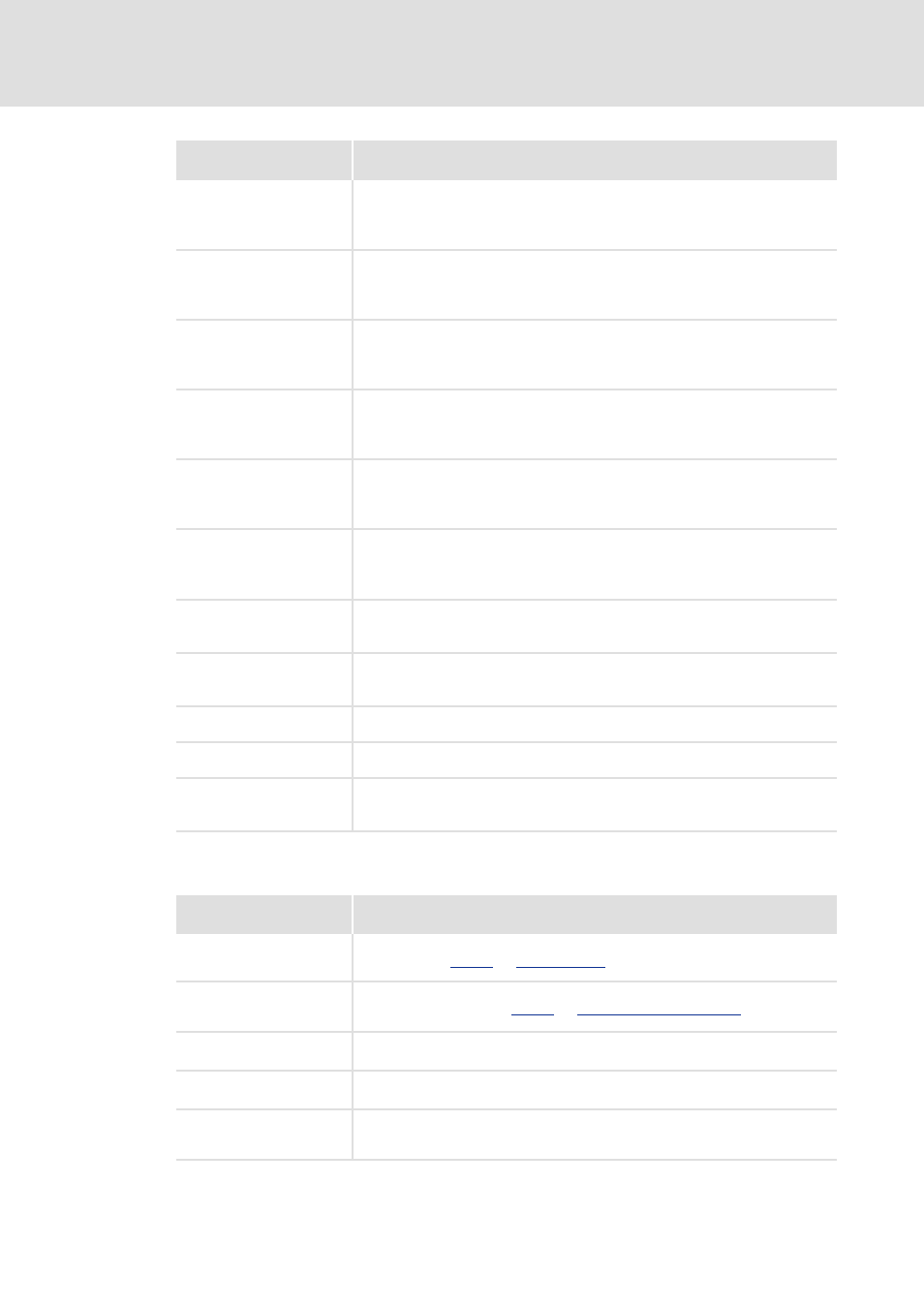
Outputs
bMI_
bMotorOrientationInverse
BOOL
Interface for the motor interface
• Input for the motor mounting position.
• Connect this input to the MI_bMotorOrientationInverse output of
the LS_MotorInterface system block.
bMI_
bSpeedBelowThresholdC19
BOOL
Interface for the motor interface
• Input for the zero speed recognition.
• Connect this input to the bSpeedBelowThresholdC19 output of the
LS_MotorInterface system block.
bPF_bEnabled
BOOL
Interface for the "position follower" basic function
• Input for the status signal "position follower basic function active".
• Connect this input to the PF_bEnabled output of the LS_Positionfollower system
block.
bSF_bEnabled
BOOL
Interface for the "speed follower" basic function
• Input for the status signal "speed follower basic function active".
• Connect this input to the SF_bEnabled output of the LS_Speedfollower system
block.
bTF_bEnabled
BOOL
Interface for the "torque follower" basic function
• Input for the status signal "torque follower basic function active".
• Connect this input to the TF_bEnabled output of the LS_Torquefollower system
block.
dnSMI_dnState
DINT
Interface for the safety module
• Input for the status signal.
• Connect this input to the SMI_bEnabled output of the LS_SafetyModulinterface
system block.
bSYNC_
bProcessDataExpected
BOOL
Input for the status information "process data expected"
• Connect this input to the SYNC_bProcessDataExpected output of
the LS_SyncInput system block.
bSYNC_
bProcessDataInvalid
BOOL
Input for the status information "process data invalid"
• Connect this input to the SYNC_bProcessDataInvalid output of the LS_SyncInput
system block.
byDigitalInput
BYTE
Input for the acceptance of the status of the digital inputs
bySafeIOState
BYTE
Input for the acceptance of the I/O status of the safety module
AxisData
Input for transfer of the machine parameters of the drive
• Connect this input to the output DI_AxisData of the system
block LS_DriveInterface.
Identifier
Data type
Info/meaning
wCiA402StatusWord
WORD
Interface to the master / master control
• Status word (
).
byCiA402
ModeOfOperationDisplay
BYTE
Interface to the master / master control
• Active operating mode (
dnCiA402ActualPosition_e4
DINT
Interface to the master / master control
• Actual position in user units (e4 representation).
dnCiA402ActualPosition_p
DINT
Interface to the master / master control
• Actual position in internal units.
dnCiA402
ActualFollowingError_e4
DINT
Interface to the master / master control
• Actual following error in user units (e4 representation).
Identifier
Data type
Information/possible settings