4 setpoint selection, 5 setpoint interpolation, Setpoint selection – Lenze E94AxHE Technology Application CiA402 Device profile User Manual
Page 139: Setpoint interpolation
EDS94TA11010xxxx EN 1.2 - 03/2010
L
139
9400 Technology applications | CiA402 device profile
Parameter setting & configuration
Interpolated position mode
3.11.4
Setpoint selection
The position setpoint for the position follower is selected via the subindex 1 (X1) of the
object (Interpolation data record).
Furthermore, the following objects are available for speed and torque feedforward
control:
The setpoints can be supplied to the common limit functions for speed, acceleration,
and braking.
3.11.5
Setpoint interpolation
If the communication cycle time differs from the control cycle time of the controller (1 ms),
the setpoint for the position follower will be interpolated. For this purpose, the drive
accepts one interpolation data setpoint per cycle and calculates for each interpolation
cycle the value displayed in the
object (position demand value) by interpolating the
position over a specific period.
The interpolation algorithm to be used is defined by the
sub mode select) and is preset to linear interpolation.
For synchronous operation, the interpolation cycle time is defined by the
(interpolation time period):
[3-2]
Definition of the interpolation cycle time
Tip!
For an interpolation cycle time of e.g. 2 ms, the value "2" must be set in
(ip time units) and the value "3" must be set in
(ip time index).
For a time coordination of the connected controllers, the
synchronisation
object (interpolation sync definition) is normally used.
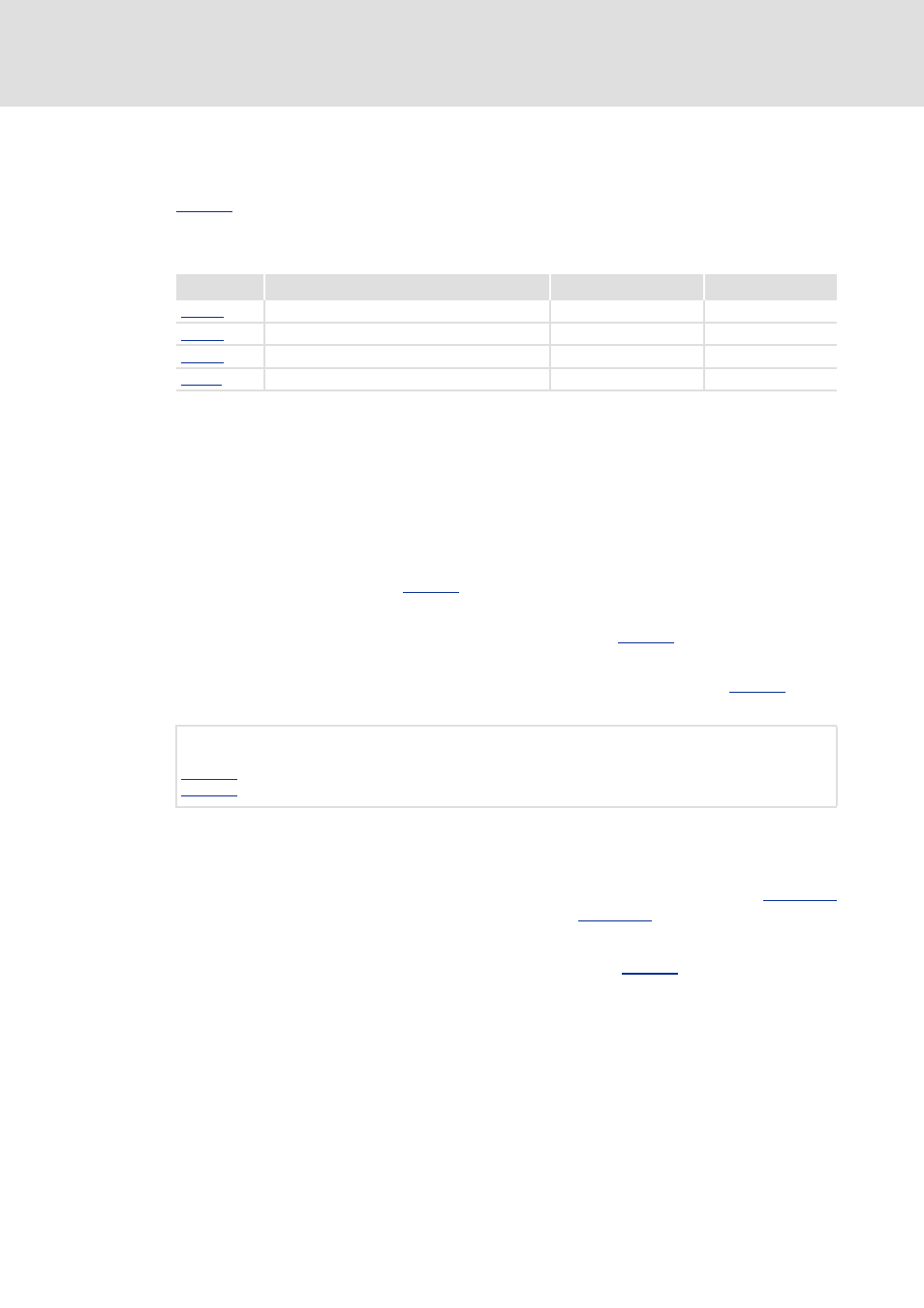
Index
Name
Data type
Object type
Torque offset
INTEGER_32
VAR
Target torque
INTEGER_32
VAR
Offset velocity
INTEGER_32
VAR
Target velocity
INTEGER_32
VAR
: ip time units
: ip time index
Interpolation cycle time s
[ ]
ip time units 10
ip time index
s
[ ]
⋅
=