7 basic function "position follower, Basic function "position follower – Lenze E94AxHE Technology Application CiA402 Device profile User Manual
Page 148
9400 Technology applications | CiA402 device profile
Parameter setting & configuration
Cyclic synchronous position mode (IEC 61800-7)
148
L
EDS94TA11010xxxx EN 1.2 - 03/2010
3.12.7
Basic function "Position follower"
The "Position follower" basic function based on the "Cyclic synchronous velocity mode"
serves as setpoint interface for position-controlled drives.
The specified position setpoint can either refer to the encoder on the motor side or to
the (position) encoder used additionally to detect the machine position. The selection
of the encoder configuration serves to adapt the internal control structure accordingly.
If the direction of rotation of the motor must be inverted due to the mounting position
of the motor or the gearbox ratio available, the use of the control signals can be
accordingly changed over by means of parameterisation.
The speed can also be precontrolled with the position setpoint by a corresponding
selection in C02681. Then, the speed is calculated by differentiation of the position
setpoint.
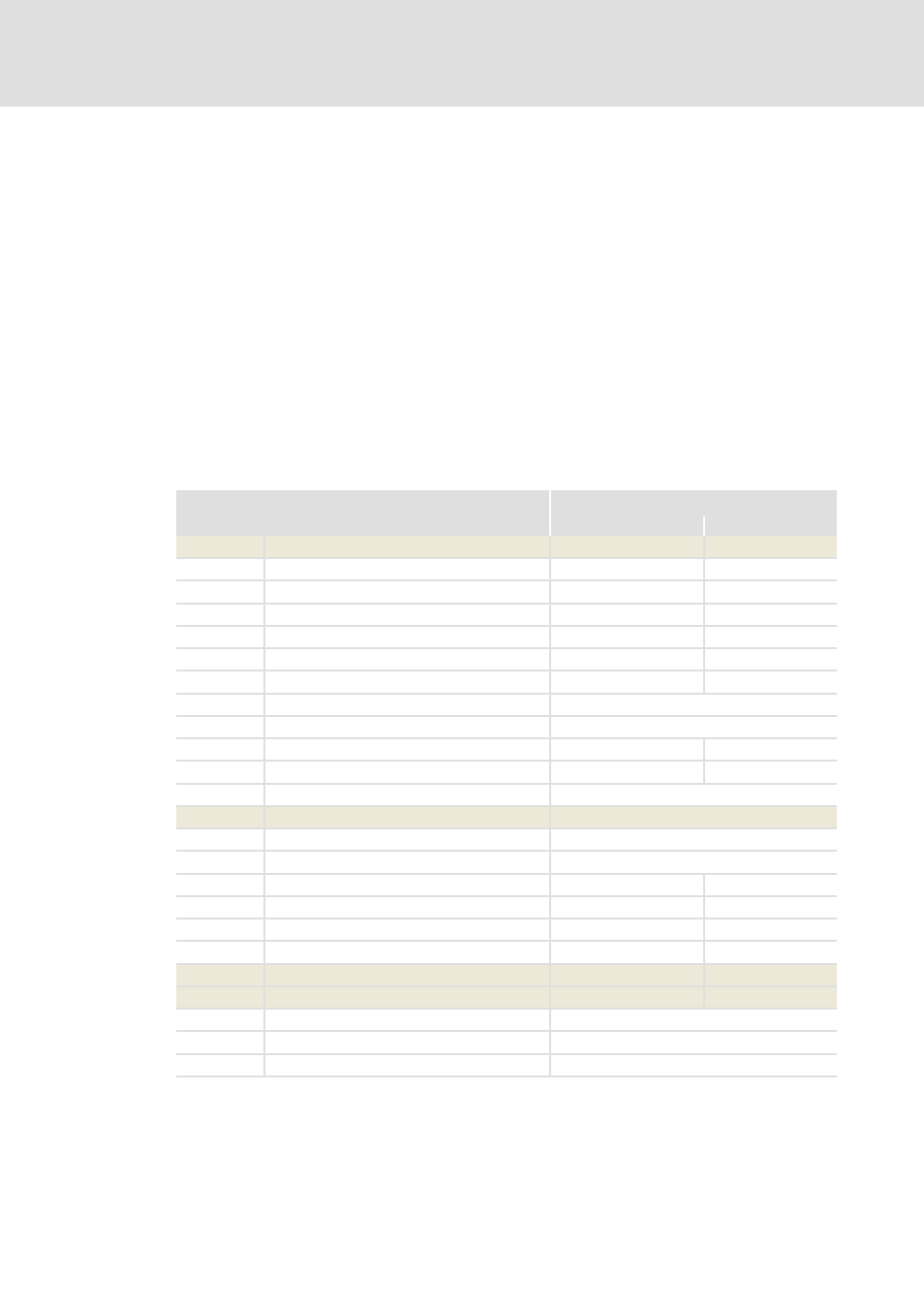
Lenze parameters (short overview)
Parameter
Lenze setting
Value Unit
C00050/1
Speed setpoint 1
- rpm
C00070
Speed controller gain
0.00700 Nm/rpm
C00071
Speed controller reset time
10.0 ms
C00072
Speed controller rate time
0.00 ms
C00254
Phase controller gain
20.00 1/s
C00273/1
Motor moment of inertia
Motor-dependent kg cm
2
C00273/2
Load moment of inertia
0.00 kg cm
2
C00275
Signal source - speed setpoint
SpeedAdd signal
C00276
Signal source - torque setpoint
TorqueAdd/AccAdd signal
C00909/1
Upper speed limit value
175.0 %
C00909/2
Lower speed limit value
-175.0 %
C02527
Motor mounting direction
Motor rotating CW
C02531/3
Effective gearbox factor (dec.)
-
C02550/1
Position setpoint interpolat.
Off
C02550/3
Torque setpoint interpolat.
Off
C02553
Position controller gain
20.00 1/s
C02554
Position controller reset time
60.000 s
C02555
D component position controller
0.000
C02556
Pos. contr. limitation
214748,3647 Unit/s
C02559/1
Upper int. torque limit
- %
C02559/2
Lower int. torque limit
- %
C02570
Position control structure
Phase control
C02680
Position setpoint source
Position setpoint input
C02681
Added speed source
Add. speed input