Lenze E94AxHE Technology Application CiA402 Device profile User Manual
Page 176
9400 Technology applications | CiA402 device profile
Parameter setting & configuration
Internal interfaces | function block "L_CiA402DeviceProfile"
176
L
EDS94TA11010xxxx EN 1.2 - 03/2010
3.19
Internal interfaces | function block "L_CiA402DeviceProfile"
The L_CiA402DeviceProfile function block contains the main functionality of the CiA402
device profile.
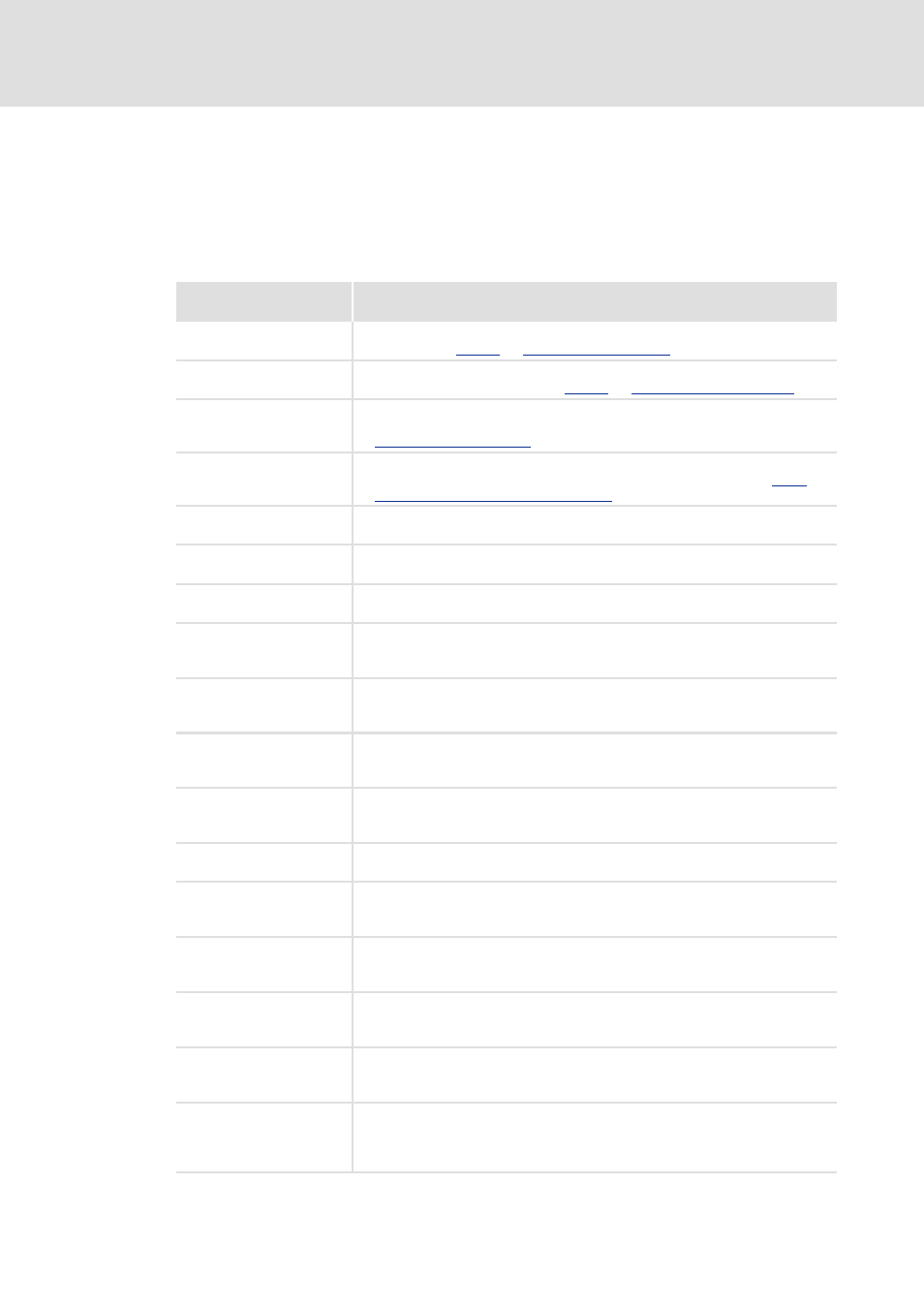
Inputs
Identifier
Data type
Information/possible settings
wCiA402ControlWord
WORD
Interface of the master / master control
• Control word (
byCiA402ModeOfOperation
BYTE
Interface of the master / master control
• Selection of the operating mode (
dnCiA402SetPosition_e4
DINT
Interface of the master / master control
• Selection of the setpoint position in user units (e4 representation) for
.
dnCiA402TargetPosition_e4
DINT
Interface of the master / master control
• Selection of the setpoint position in user units (e4 representation) for
synchronous position mode (IEC 61800-7)
dnCiA402OffsetPosition_e4
DINT
Interface of the master / master control
• Selection of a position offset in user units (e4 representation).
dnCiA402TargetSpeed_e4
DINT
Interface of the master / master control
• Selection of a set speed in user units (e4 representation).
dnCiA402OffsetSpeed_e4
DINT
Interface of the master / master control
• Selection of a speed offset in user units (e4 representation).
dnCiA402TargetTorque_n
DINT
Interface of the master / master control
• Selection of a torque in [%].
• 2
30
≡ 100 % ≡ C00057/2
dnCiA402OffsetTorque_n
DINT
Interface of the master / master control
• Selection of a torque offset in [%].
• 2
30
≡ 100 % ≡ C00057/2
wCiA402PosTorqueLimit_a
WORD
Interface of the master / master control
• Selection of the positive torque limit in [%].
• 2
16
≡ 100% ≡ C00057/2
wCiA402NegTorqueLimit_a
WORD
Interface of the master / master control
• Selection of the negative torque limit in [%].
• 2
16
≡ 100% ≡ C00057/2
byCiA402DigitalOutput
BYTE
Interface of the master / master control
• Selection of the states of the digital outputs.
dnHM_dnState
DINT
Interface for the "homing" basic function
• Input for the status signal of the basic function.
• Connect this input to the HM_dnState output of the LS_Homing system block.
bHM_bEnabled
BOOL
Interface for the "homing" basic function
• Input for the status signal "enable homing basic function".
• Connect this input to the HM_bEnabled output of the LS_Homing system block.
bHM_bActive
BOOL
Interface for the "homing" basic function
• Input for the status signal "homing basic function active".
• Connect this input to the HM_bActive output of the LS_Homing system block.
bHM_bDone
BOOL
Interface for the "homing" basic function
• Input for the status signal "homing completed".
• Connect this input to the HM_bDone output of the LS_Homing system block.
bHM_bHomePosAvailable
BOOL
Interface for the "homing" basic function
• Input for the status signal "home position available".
• Connect this input to the HM_bHomePosAvailable output of the LS_Homing
system block.