3 signal flow, Signal flow, Position follower – Lenze E94AxHE Technology Application CiA402 Device profile User Manual
Page 137
EDS94TA11010x
xxx
EN
1.2 - 03/2010
L
13
7
9400 Technology applications
| CiA402 device profile
Parameter setting & configuration
Interpolated position mode
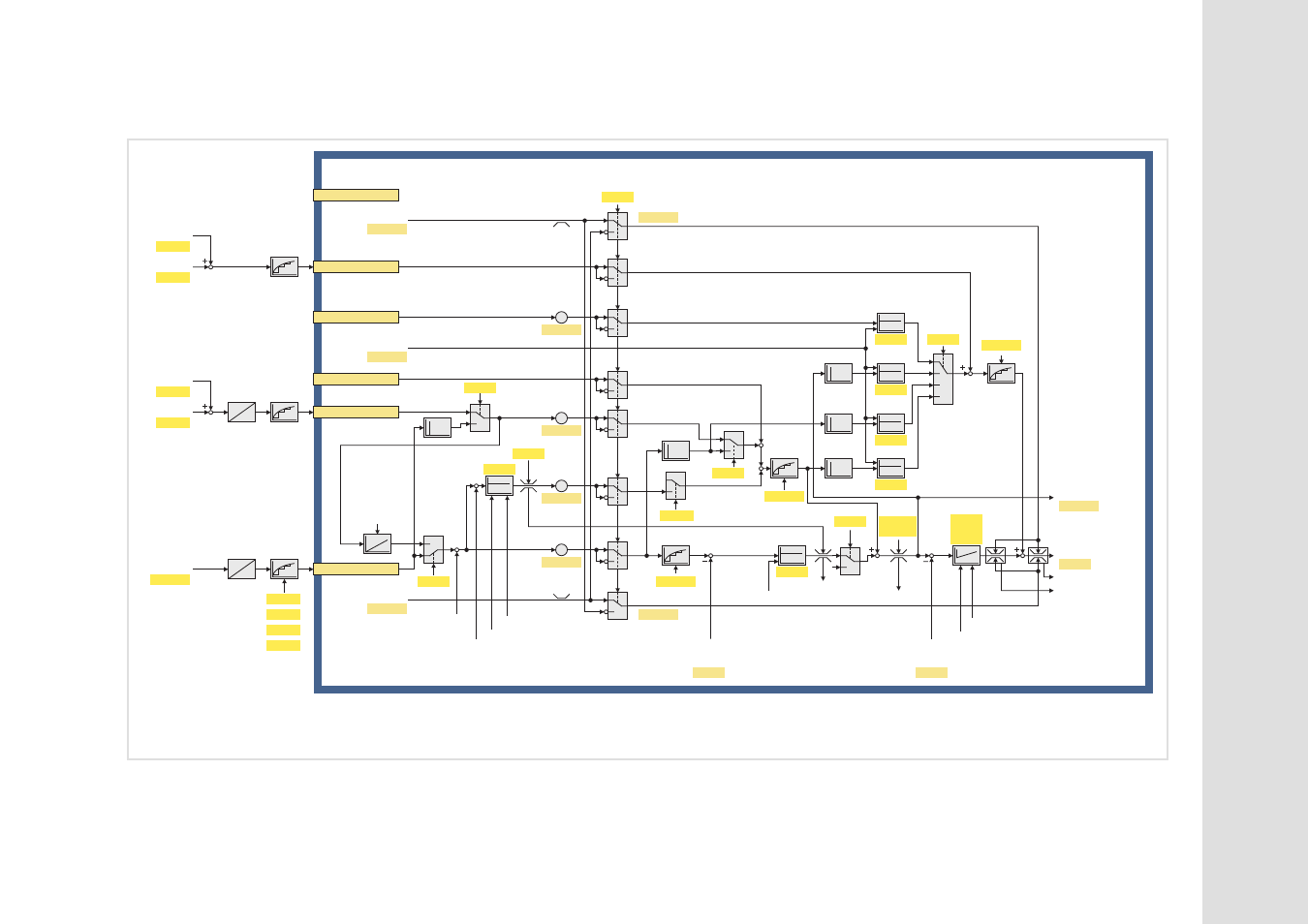
3.11.3
Signal flow
[3-1]
Access to the "position follower" basic function via the CiA402 device profile
n
...q Signals of the signal flow encoder evaluation
FDB_... = input/output signals of the encoder evaluation
MI_... = Input/output signals of the motor interface
1
0
2
2
1
1
0
1
0
PF_dnAccAdd_x
1
0
PF_dnPositionSet_p
1
0
1
0
MI_bSpeedCtrlLimited
MI_bTorqueSetpointLimited
MI_dnTorqueSetpoint_n
MI_bResetSpeedCtrlIntegrator
MI_dnSpeedSetpoint_n
MI_dnSpeedCtrlAdapt_n
PF_dnSpeedAdd2_n
PF_dnTorqueAdd_n
1
0
1
0
2
1
i
i
i
MI_dnPosCtrlAdaptLoad_n
MI_bPosCtrlIntegratorOn
0
1
FDB_dnActualPos_p
FDB_dnPosOffset_p
MI_dnPosCtrlAdaptMotor_n
MI_bPosCtrlLimited
MI_bSpeedSetpointLimited
PF_dnSpeedAdd1_s
Vp
Tn
Td
0
C02559/1
1
0
C02527
0
MI_dnTorqueHighLimit_n
C02568/4
1
0
0
MI_dnTorqueLowLimit_n
C02568/5
C02559/2
i
MI_dnInertiaAdapt_n
C02568/8
1
0
C02681
0
3
C00254
C00273
C00273
C00276
C00275
C00909/1
C00909/2
C00070
C00071
C00072
C02531/3
C00770
C00772
C02680
C02550/1
C02570
C00050/1
C02550/2
C02570
C02550/3
C00273
C00776
C02556
C02531/3
C02531/3
C02531/3
C02553
C00273
Lageistwert
Geberauswertung
Motorposition
Geberauswertung
Motordrehzahl
Geberauswertung
Interpolator
Winkelregler
Interpolator
Drehzahlregler
Interpolator
Lageregler
(3)
(5)
(1)
(4)
(9)
(8)
(2)
(6)
(7)
PF_dnAccAdd_x
PF_dnPositionSet_p
PF_dnSpeedAdd2_n
PF_dnTorqueAdd_n
PF_dnSpeedAdd1_s
PF_bEnable
0x60C1/1
X1
Unit
_p
Interpolation
0x6071
Target torque
0x60B2
Torque offset
0x60FF
Target velocity
0x60B1
Offset velocity
Unit
_s
Interpolation data configuration 0x60C4
Interpolation sync definition 0x60C3
Interpolation sub mode select 0x60C0
Interpolation time period 0x60C2
Position follower
Interpolation
Interpolation